
“Personal Robot with a Sense of Taste” by Hashimoto, Shimazu, Kobayashi and Kameoka
Conference:
- SIGGRAPH 2008
-
More from SIGGRAPH 2008:


Type(s):
Entry Number: 34
Title:
- Personal Robot with a Sense of Taste
Presenter(s):
Description:
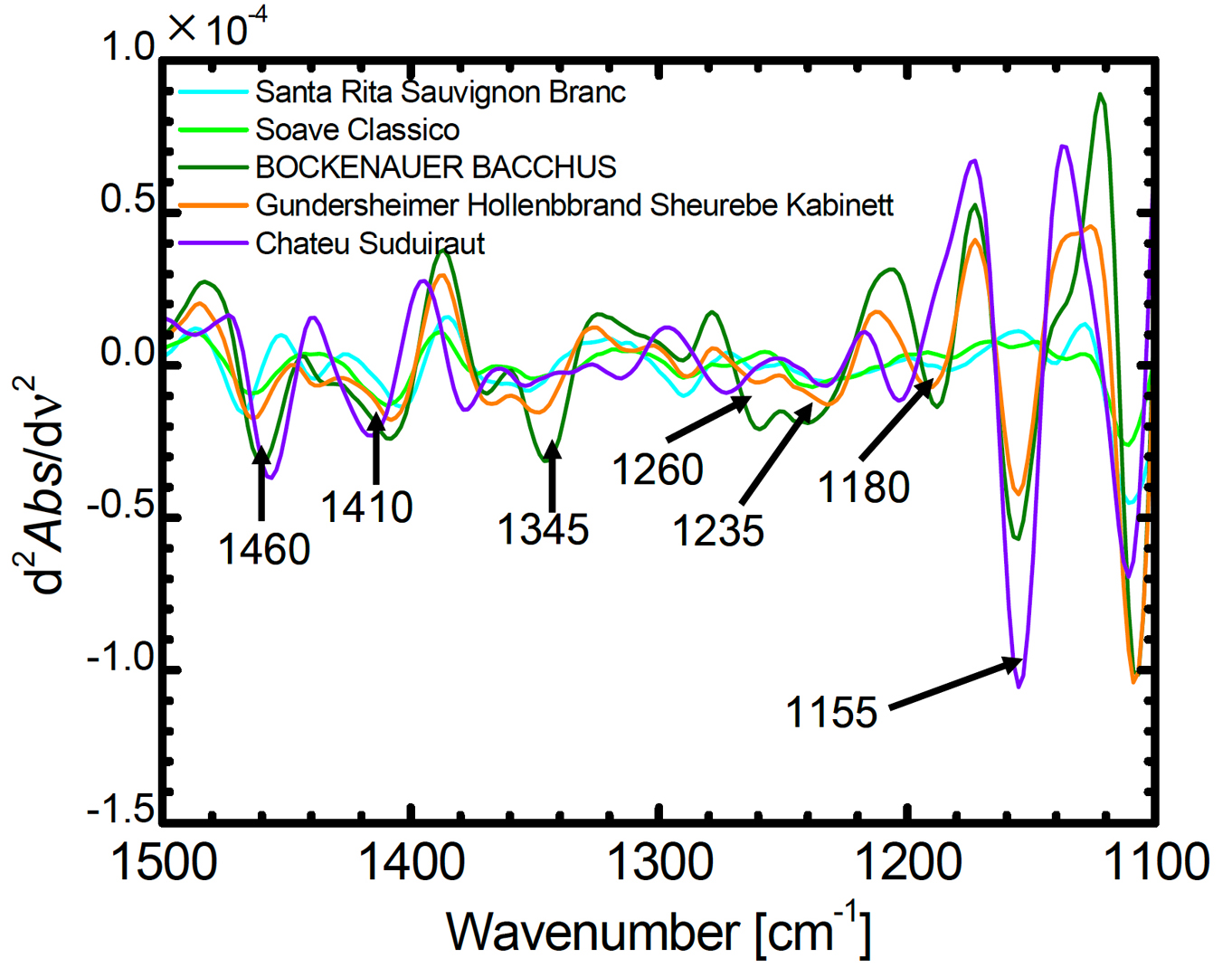
This paper describes an artificial sense of taste and the world’s first “Tasting Robot”, which was developed under support by the New Energy and Industrial Technology Development Organization (NEDO) for the Robot Project: Prototype Robot Exhibition at EXPO 2005 Aichi, Japan. The robot has a sense of taste based on an optical tongue concept. The optical tongue is the integration of infrared (IR) spectroscopy with pattern recognition technologies.
It acquires an IR spectrum of a food sample, spectroscopically and quantitatively analyzes the food components, and identifies the name of the food. As these results are transmitted to the body of the Tasting Robot, it evaluates them and promptly gives various advices on health and meal to a user in natural language with graphical images. It sees if foods are best to eat, the taste has deteriorated, or if they are good for health from the point of the content of sugar and fat and gave advices to users by referring to food and health knowledge bases. Especially in case of wine, the robot behaves as the Sommelier Robot (Wine-Bot). The Wine-Bot is a functionally enhanced version of the Tasting Robot.