
“TELESAR V: TELExistence Surrogate Anthropomorphic Robot” by Fernando, Furukawa, Kurogi, Hirota, Kamuro, et al. …

Conference:
Experience Type(s):
Title:
- TELESAR V: TELExistence Surrogate Anthropomorphic Robot
Entry Number: 23
Organizer(s)/Presenter(s):
Description:
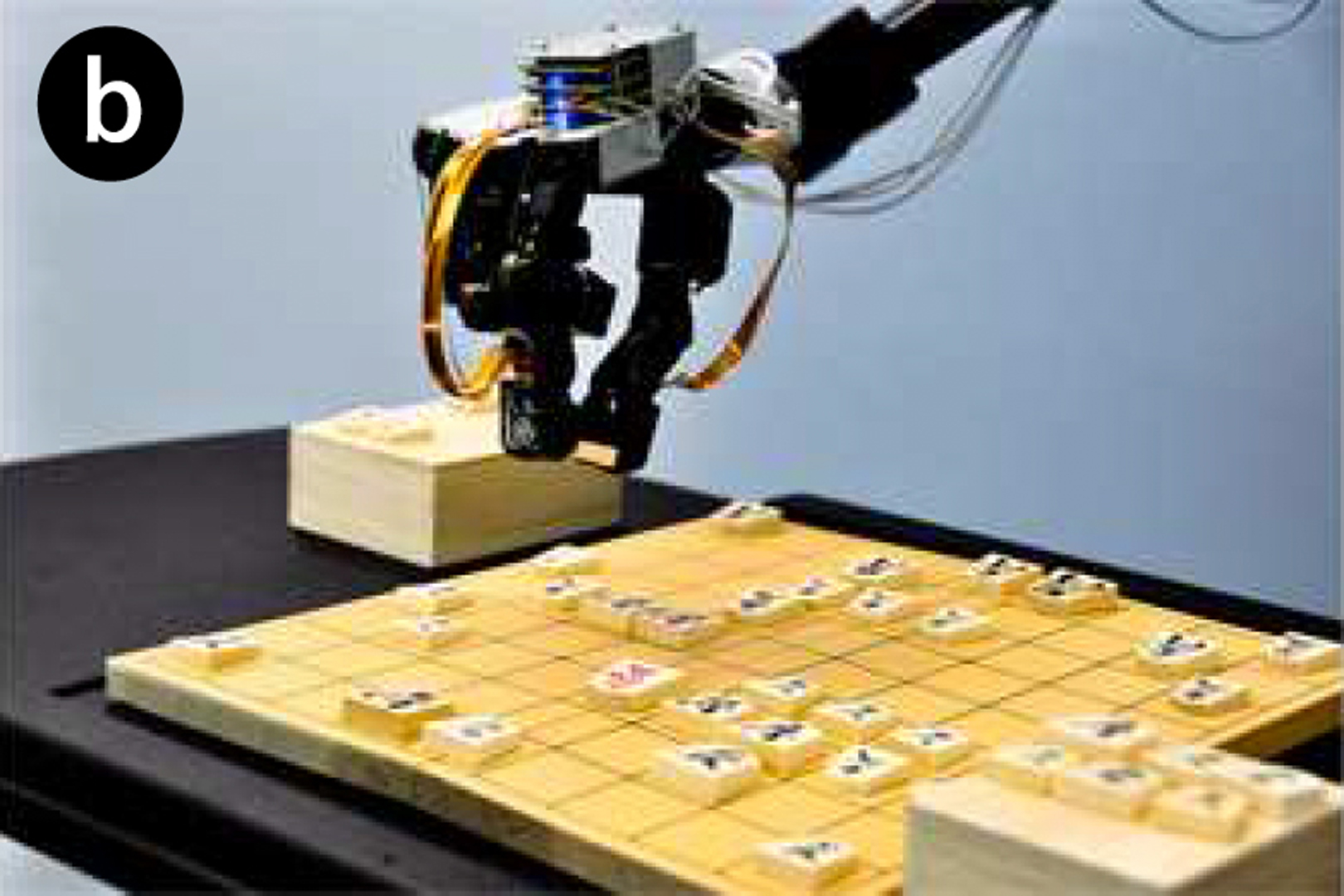
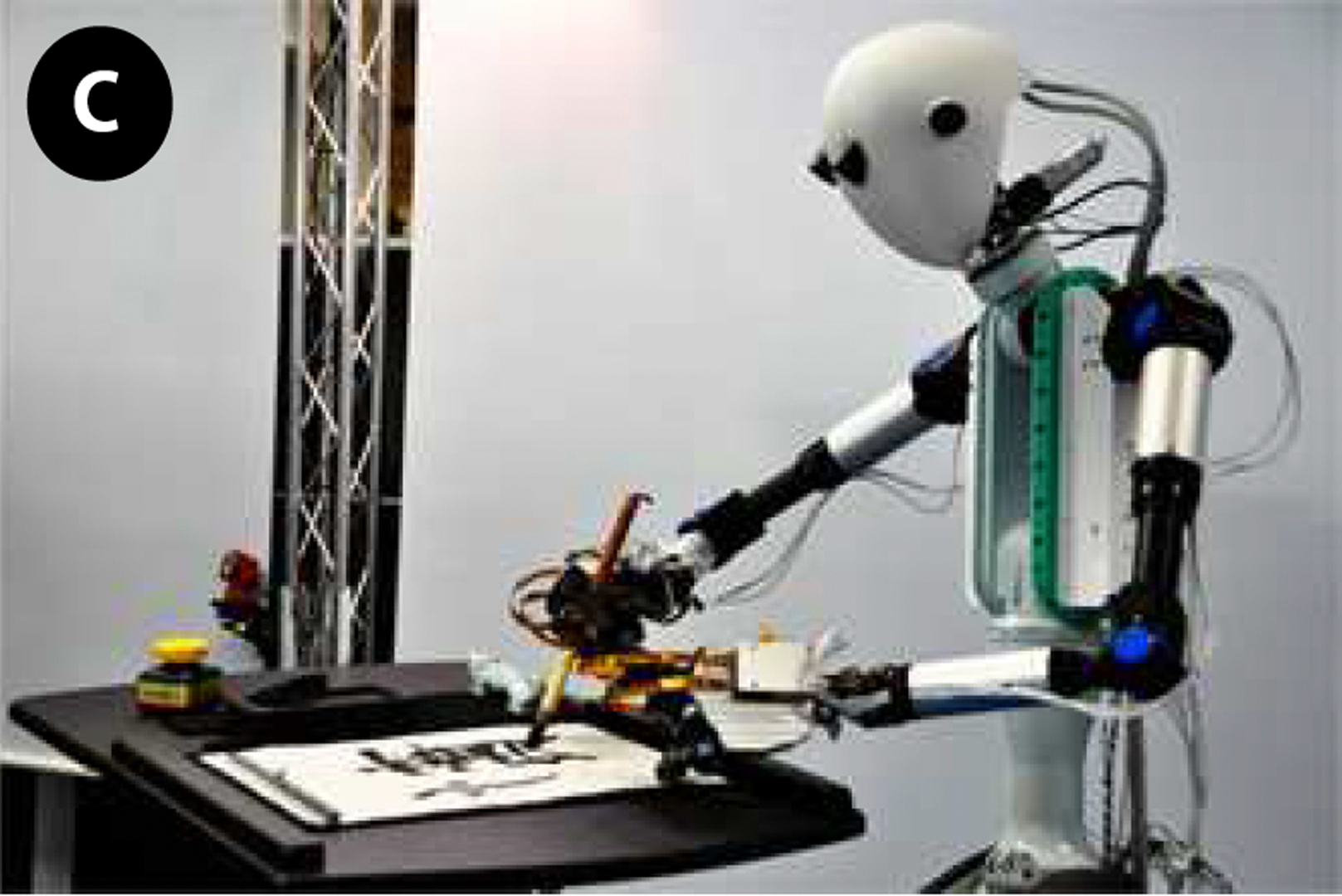
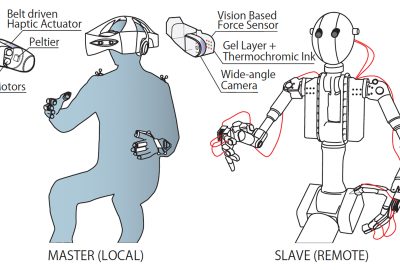
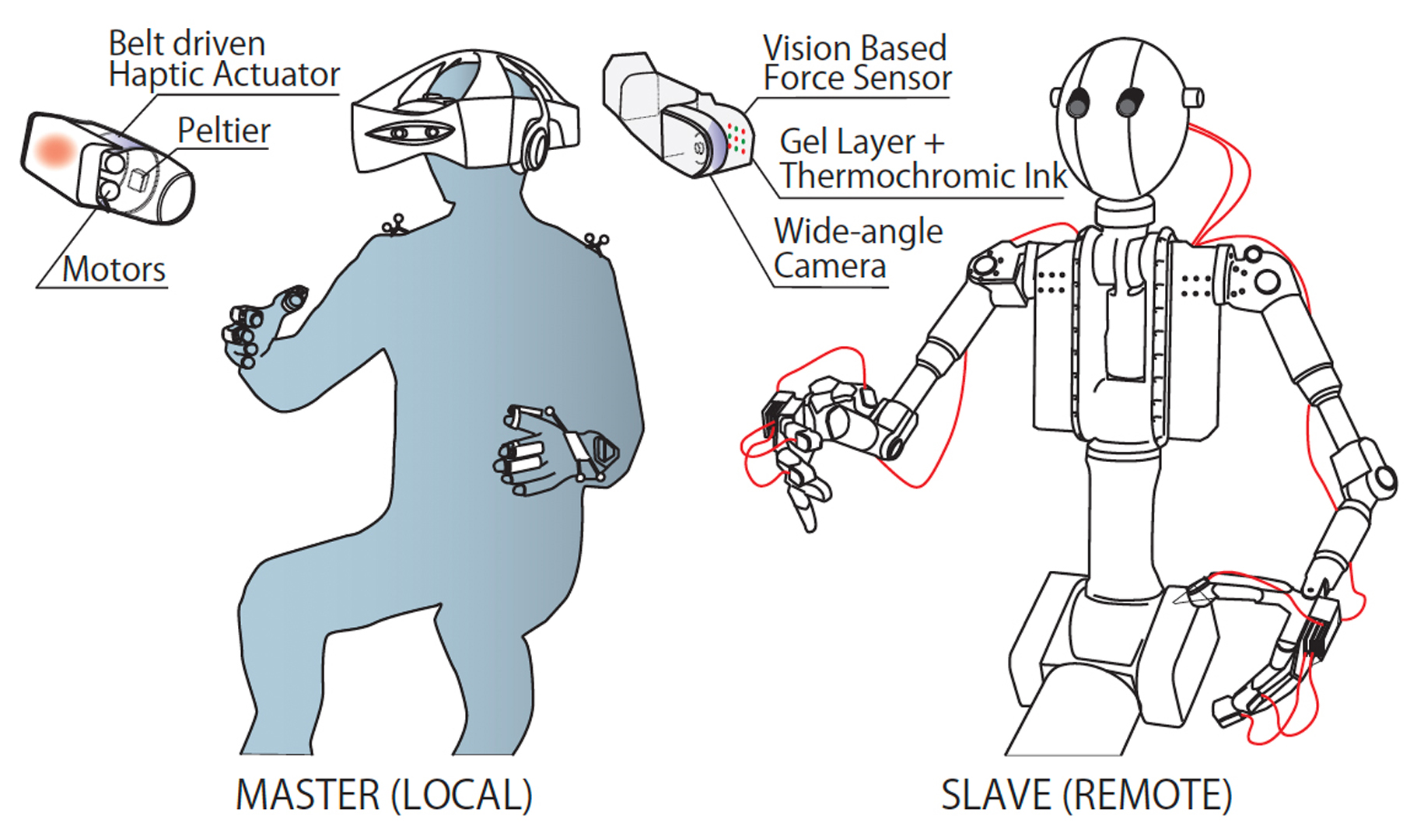
Telexistence is fundamentally a concept named for the general technology that enables a human being to have a real-time sensation of being at a place other than where he actually exist, and to interact with the remote environment [Tachi et al. 1990]. We have achieved human-like neck movements to visually interact with a remote object in 3 dimensional space through previous versions of TELESAR [Watanabe et al. 2007]. We introduce “TELESAR V” which maps a user’s spinal1, neck, head and arm movements into a dexterous slave robot and allowing the operator to feel the robot’s body as his own body through visual, auditory, kinesthetic and fingertip tactile [Sato et al. 2007] sensation. With TELESAR V, operator can perform teleoperations confidently with no prior practice.
References:
MINAMIZAWA, K., KAMURO, S., FUKAMACHI, S., KAWAKAMI, N., AND TACHI, S. 2008. Ghostglove: haptic existence of the virtual world. In ACM SIGGRAPH 2008 new tech demos, ACM, New York, NY, USA, SIGGRAPH ’08, 18:1–18:1.
SATO, K., MINAMIZAWA, K., KAWAKAMI, N., AND TACHI, S. 2007. Haptic telexistence. In ACM SIGGRAPH 2007 emerging technologies, ACM, New York, NY, USA, SIGGRAPH ’07.
TACHI, S., ARAI, H., AND MAEDA, T. 1990. Tele-existence master-slave system for remote manipulation. In Proceedings. IROS ’90. IEEE International Workshop on, 343 –348 vol.1.
WATANABE, K., KAWABUCHI, I., KAWAKAMI, N., MAEDA, T., AND TACHI, S. 2007. Torso: completion of egocentric telegnosis system. In ACM SIGGRAPH 2007 emerging technologies, ACM, New York, NY, USA, SIGGRAPH ’07.
Additional Images:
-
- 2012 ETech Fernando: TELESAR V: TELExistence Surrogate Anthropomorphic Robot
-
- 2012 ETech Fernando: TELESAR V: TELExistence Surrogate Anthropomorphic Robot
Acknowledgements:
This project is supported by JST-CREST Haptic Media Project and collaborated with Kyokko Electric co.,Ltd.