
“Tangible and Modular Input Device for Character Articulation” by Jacobson, Panozzo, Glauser, Pradalier, Hilliges, et al. …

Conference:
- SIGGRAPH 2014
-
More from SIGGRAPH 2014:


Type(s):
Title:
- Tangible and Modular Input Device for Character Articulation
Presenter(s):
Description:
Interactively articulating virtual 3D characters lies at the heart of computer animation and geometric modeling. Expressive articulation requires control over many degrees of freedom: most often the joint angles of an internal skeleton. We introduce a physical input device assembled on the fly to control any character’s skeleton directly. With traditional mouse and keyboard input, animators must rely on indirect methods such as inverse kinematics or decompose complex and integrated motions into smaller sequential manipulations—for example, iteratively positioning each bone of a skeleton hierarchy. While direct manipulation mouse and touch interfaces are successful in 2D [Shneiderman 1997], 3D interactions with 2D input are ill-posed and thus more challenging. Successful commercial products with 2D interfaces, e.g. Autodesk’s MAYA, have notoriously steep learning curves and require interface-specific training.
Mouse and keyboard interfaces fall short because their control spaces do not match the perceptual space of the 3D interaction task [Jacob et al. 1994]. Hence, we propose direct physical manipulation via a tangible interface [Ishii and Ullmer 1997] with degrees of freedom matching the 3D rotations at skeletal joints in the virtual character.
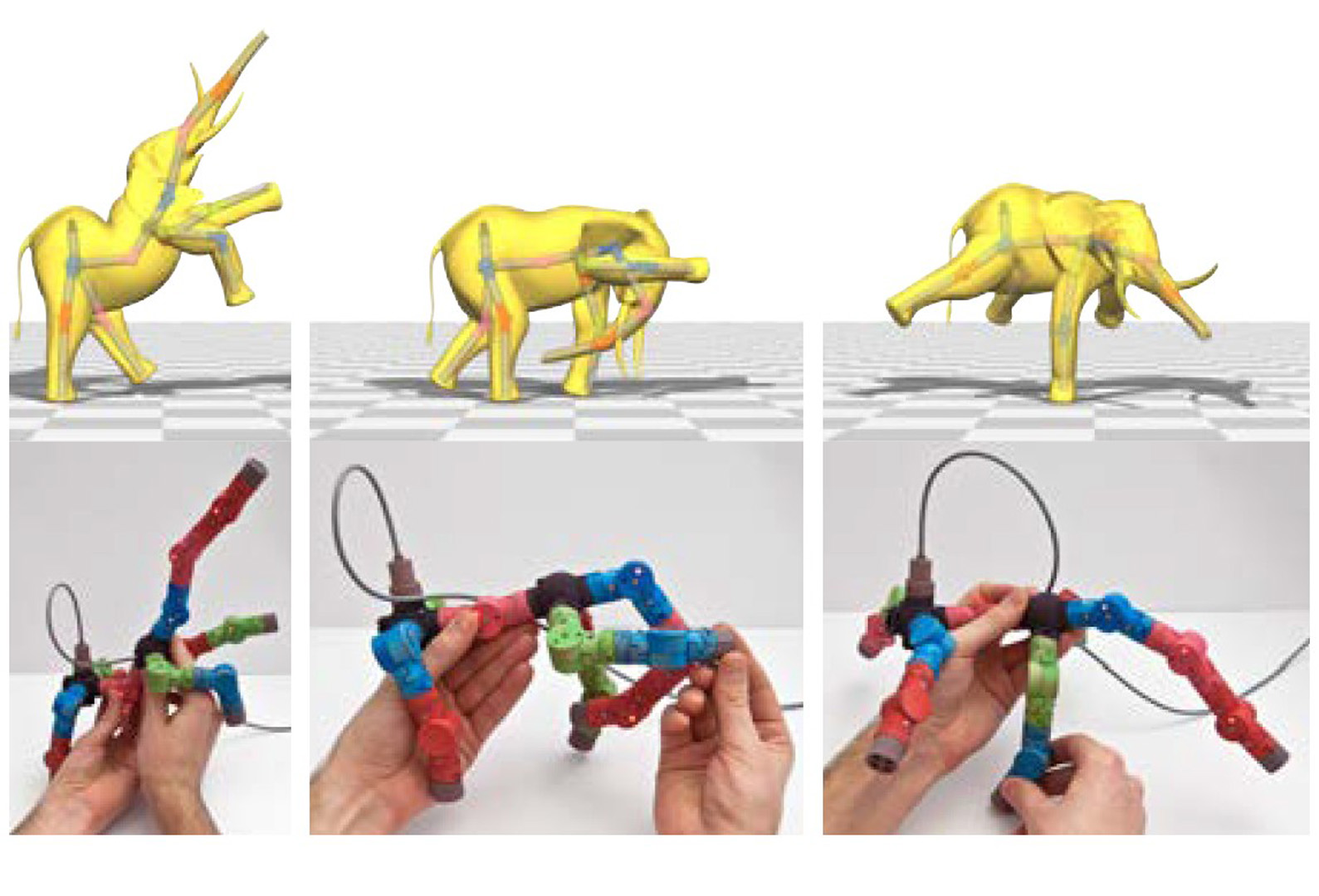
Our novel device is composed of modular, hot-pluggable mechanical parts. The user may quickly assemble measurement joints and branching splitters to create a custom device to control any virtual character with arbitrary topology skeleton (see Figure 1). Leveraging modern advances in 3D printing, our parts are compact and comfortably held with one or two hands.