“Surround Haptics: Sending Shivers Down Your Spine” by Israr, Poupyrev, Ioffreda, Cox, Gouveia, et al. …
Notice: Pod Template PHP code has been deprecated, please use WP Templates instead of embedding PHP. has been deprecated since Pods version 2.3 with no alternative available. in /data/siggraph/websites/history/wp-content/plugins/pods/includes/general.php on line 518

Conference:
- SIGGRAPH 2011
-
More from SIGGRAPH 2011:
Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345

Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345


Type(s):
Entry Number: 14
Title:
- Surround Haptics: Sending Shivers Down Your Spine
Presenter(s):
Description:
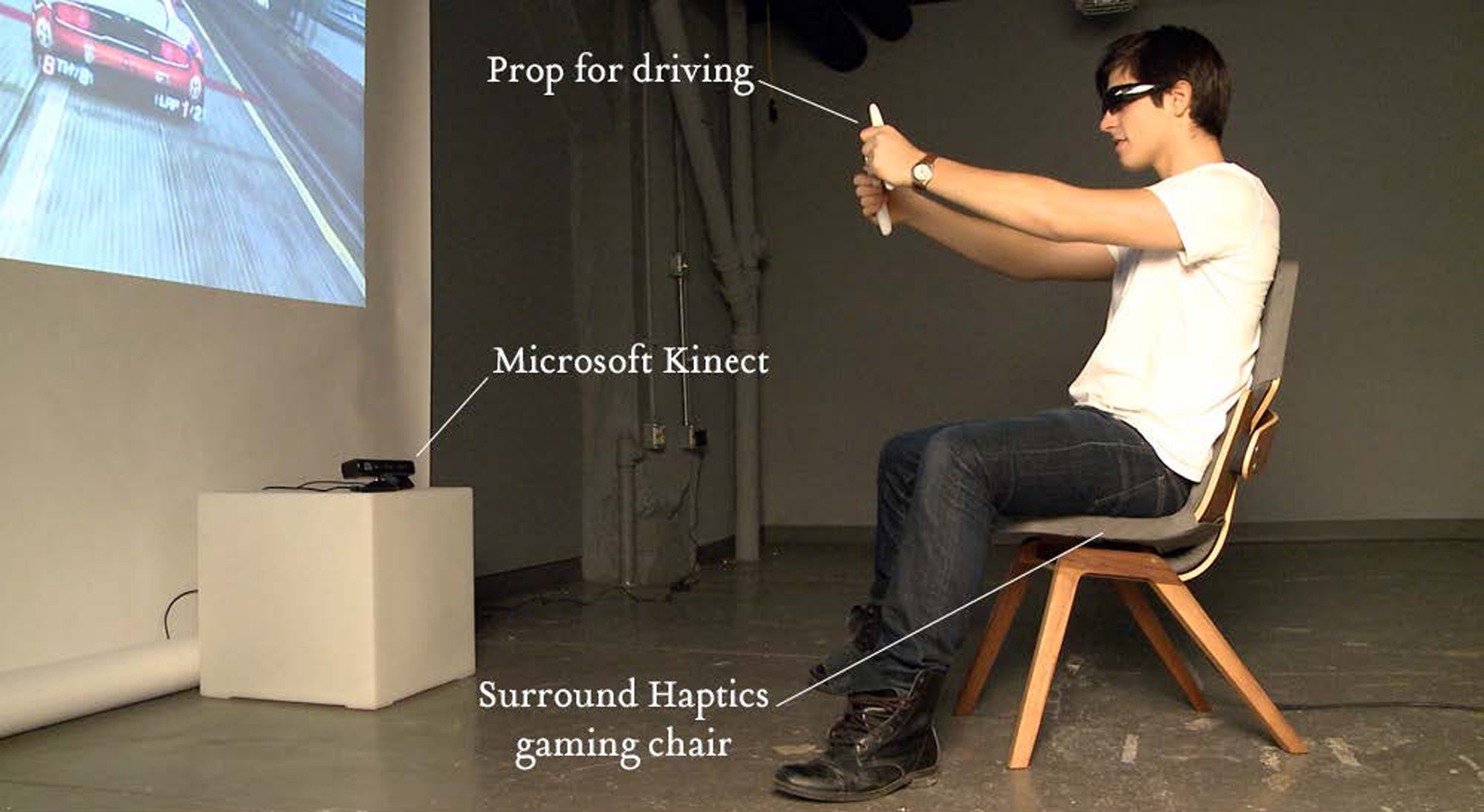
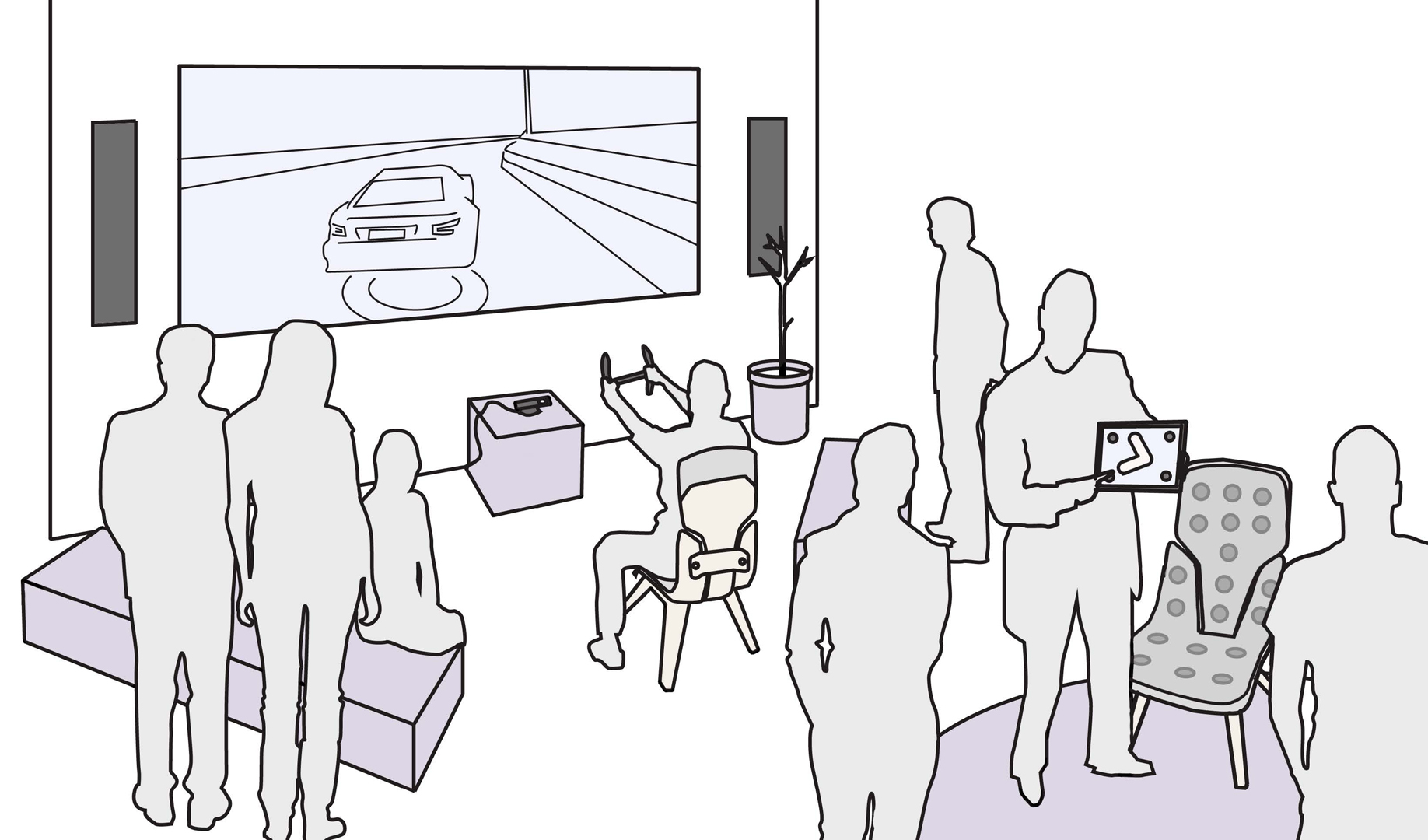
Surround Haptics is a new tactile technology that uses a low-resolution grid of inexpensive vibrating actuators to generate high-resolution, continuous, moving tactile strokes on human skin [1]. The user would not feel the discrete tactile pulses and buzzes that are so common today, but rather a smooth tactile motion, akin to what we feel when someone drags a finger across our skin.
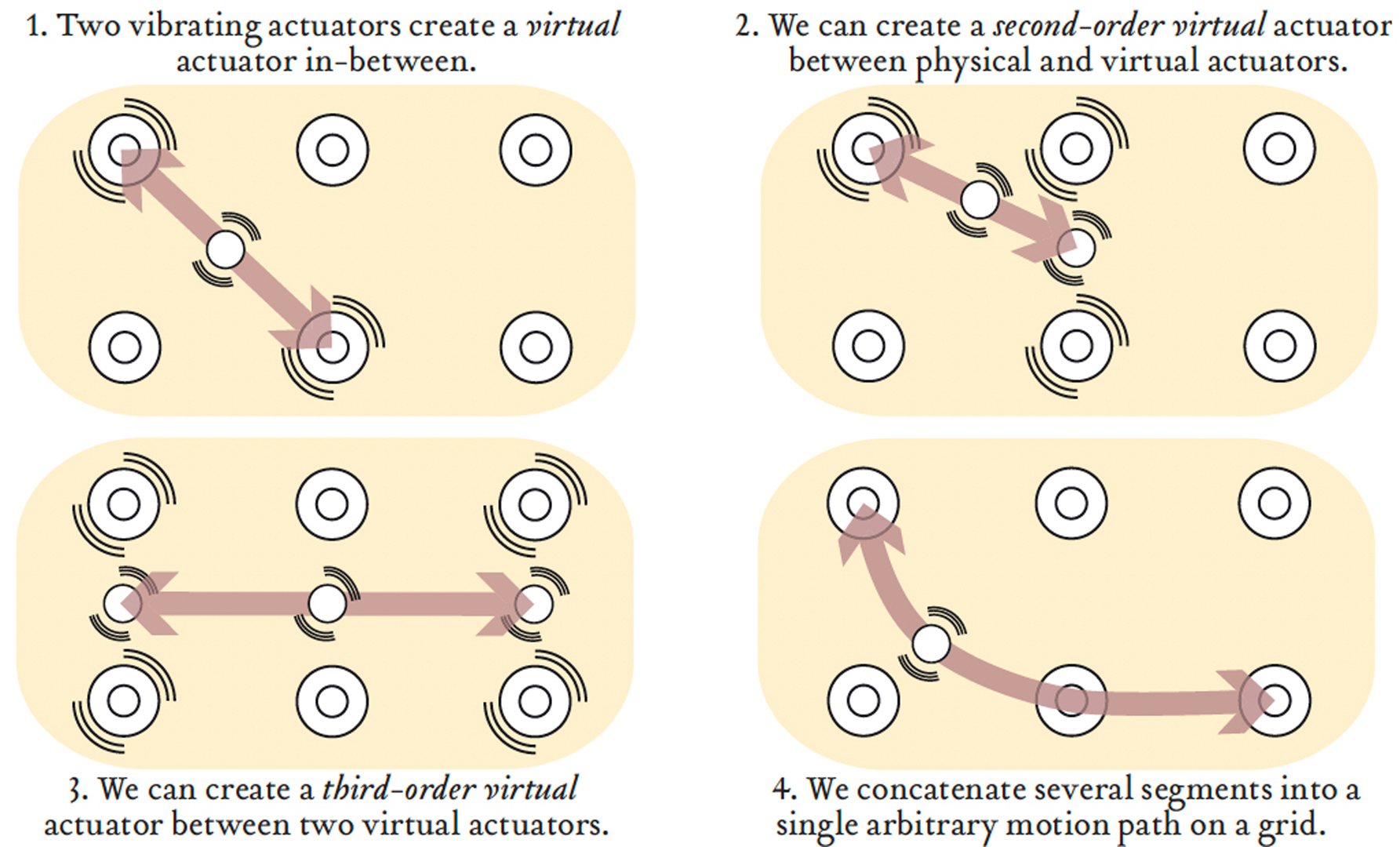
Surround Haptics is based on a carefully designed and thoroughly evaluated algorithm that uses tactile illusions to create and move virtual actuators anywhere on a grid. A virtual actuator can be created using any pair of physical actuators (Figure 1.1): the user would feel only a single vibrating point, not two separate physical ones. The algorithm is recursive. This allows for the generation of virtual actuators using physical-virtual and virtual-virtual actuator pairs (Figure 1.2, 1.3). This permits the creation of complex trajectories on skin using low-resolution actuator grids (Figure 1.4).
The entire algorithm is based on rigorous psychophysical experiments and new models of tactile perception that we have formulated. It allows us to control speed, location, direction, length and intensity of the moving tactile strokes. The details can be found in supplementary materials as well as in an upcoming publication [1].
References:
Israr, A., Poupyrev, I. Tactile Brush: Drawing on skin with a tactile grid Display. To appear in ACM CHI 2011, May: Vancouver, Canada.
Additional Images: