
“Real-time Motion Generation for Imaginary Creatures Using Hierarchical Reinforcement Learning” by Ogaki and Nakamura
Conference:
- SIGGRAPH 2018
-
More from SIGGRAPH 2018:


Type(s):
Title:
- Real-time Motion Generation for Imaginary Creatures Using Hierarchical Reinforcement Learning
Presenter(s):
Description:
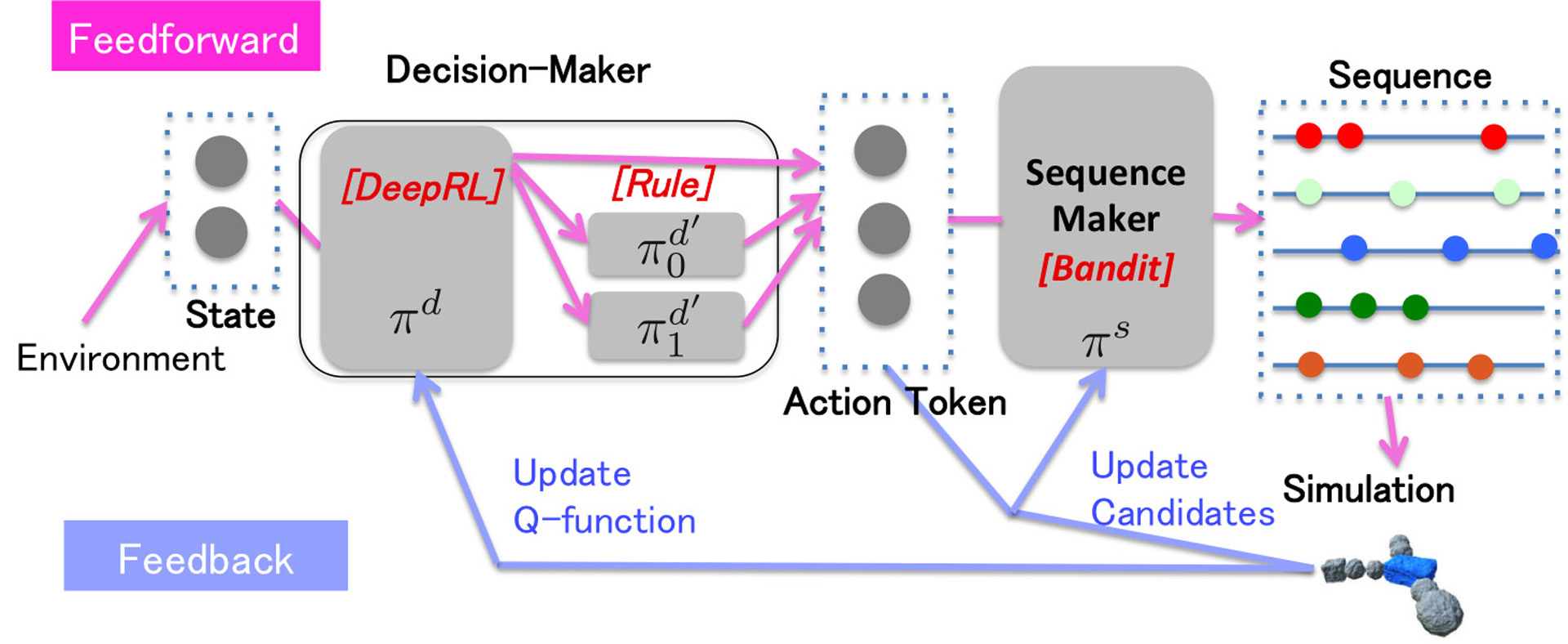
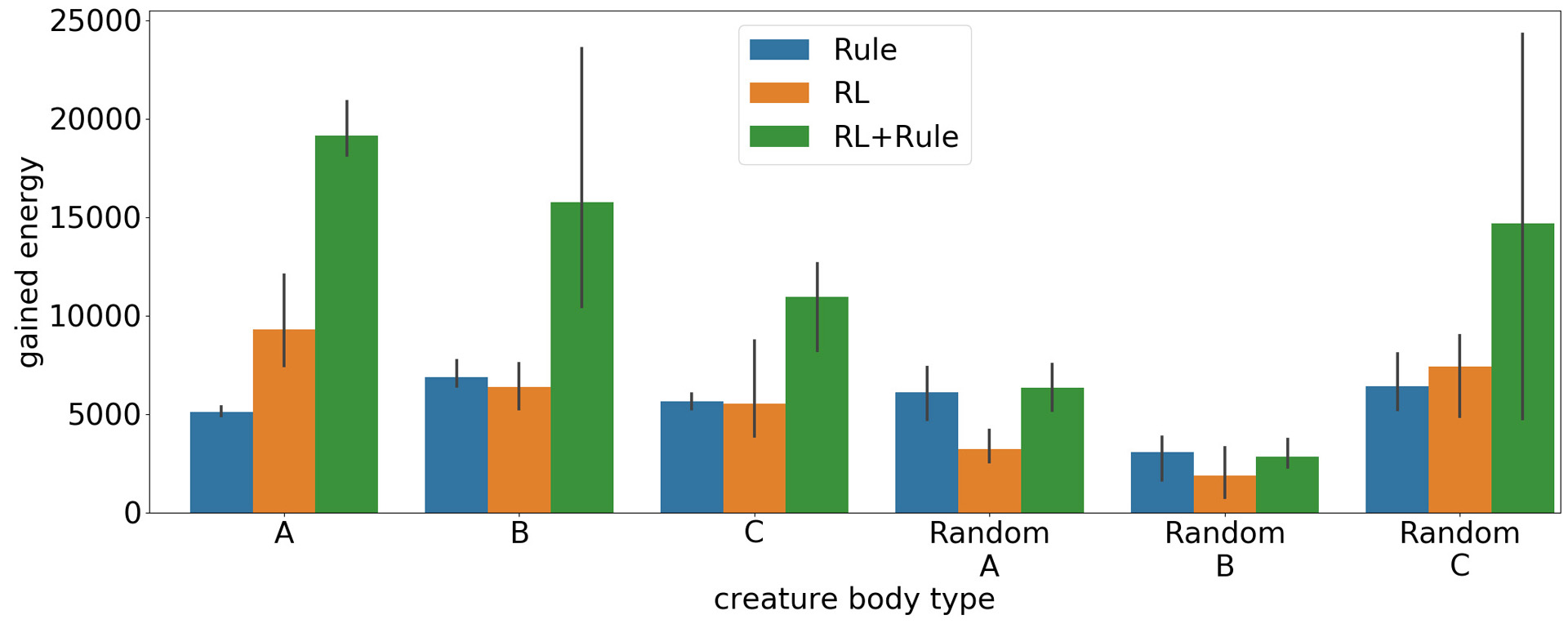
Describing the motions of imaginary original creatures is an essential part of animations and computer games. One approach to generate such motions involves finding an optimal motion for approaching a goal by using the creatures’ body and motor skills. Currently, researchers are employing deep reinforcement learning (DeepRL) to find such optimal motions. Some end-to-end DeepRL approaches learn the policy function, which outputs target pose for each joint according to the environment. In our study, we employed a hierarchical approach with a separate DeepRL decision maker and simple exploration-based sequence maker, and an action token, through which these two layers can communicate. By optimizing these two functions independently, we can achieve a light, fast-learning system available on mobile devices. In addition, we propose another technique to learn the policy at a faster pace with the help of a heuristic rule. By treating the heuristic rule as an additional action token, we can naturally incorporate it via Q-learning. The experimental results show that creatures can achieve better performance with the use of both heuristics and DeepRL than by using them independently.