“Non-Line-of-Sight MoCap” by Klein, Peters, Laurenzis and Hullin
Conference:
- SIGGRAPH 2017
-
More from SIGGRAPH 2017:


Type(s):
Entry Number: 18
Title:
- Non-Line-of-Sight MoCap
Presenter(s):
Description:
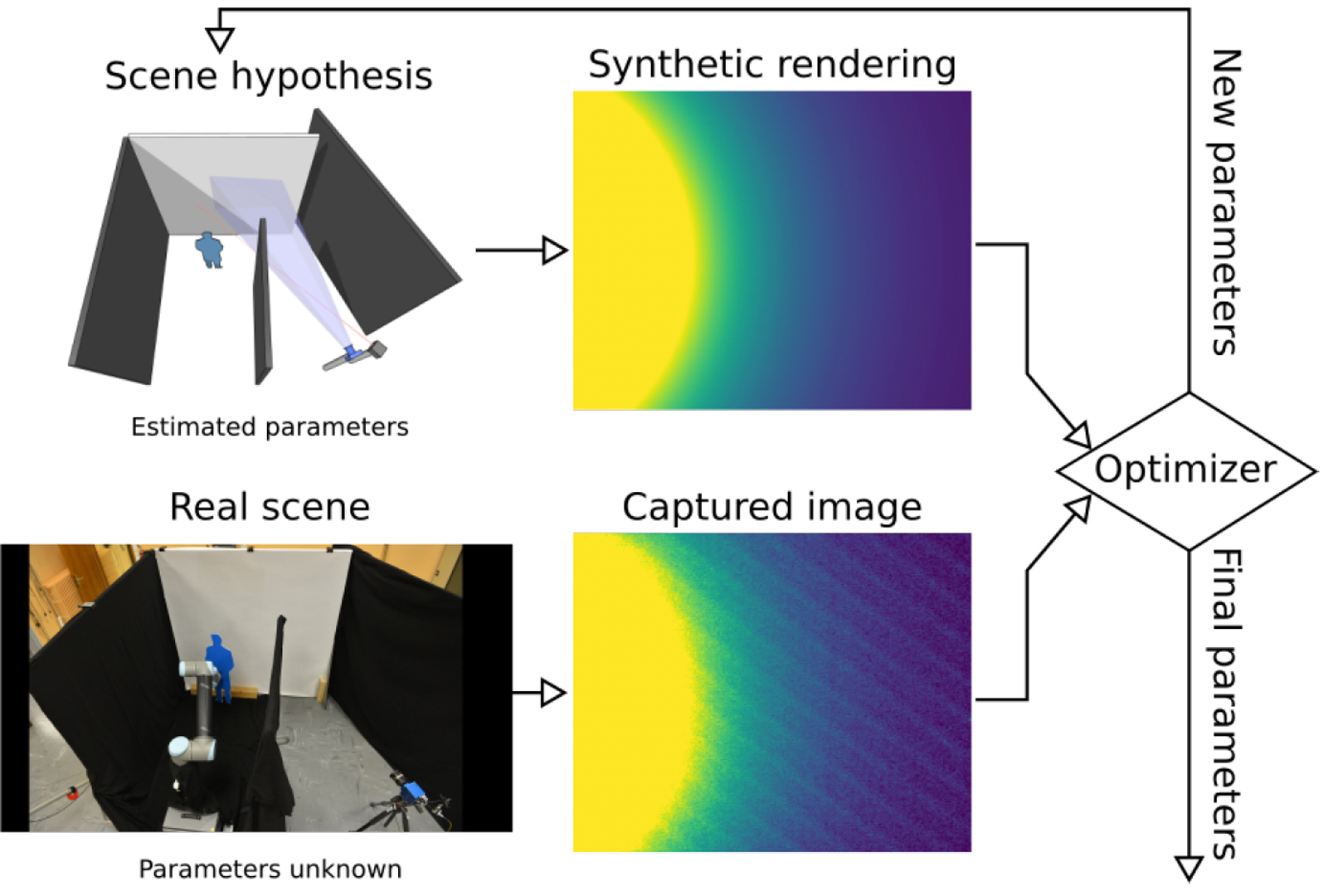
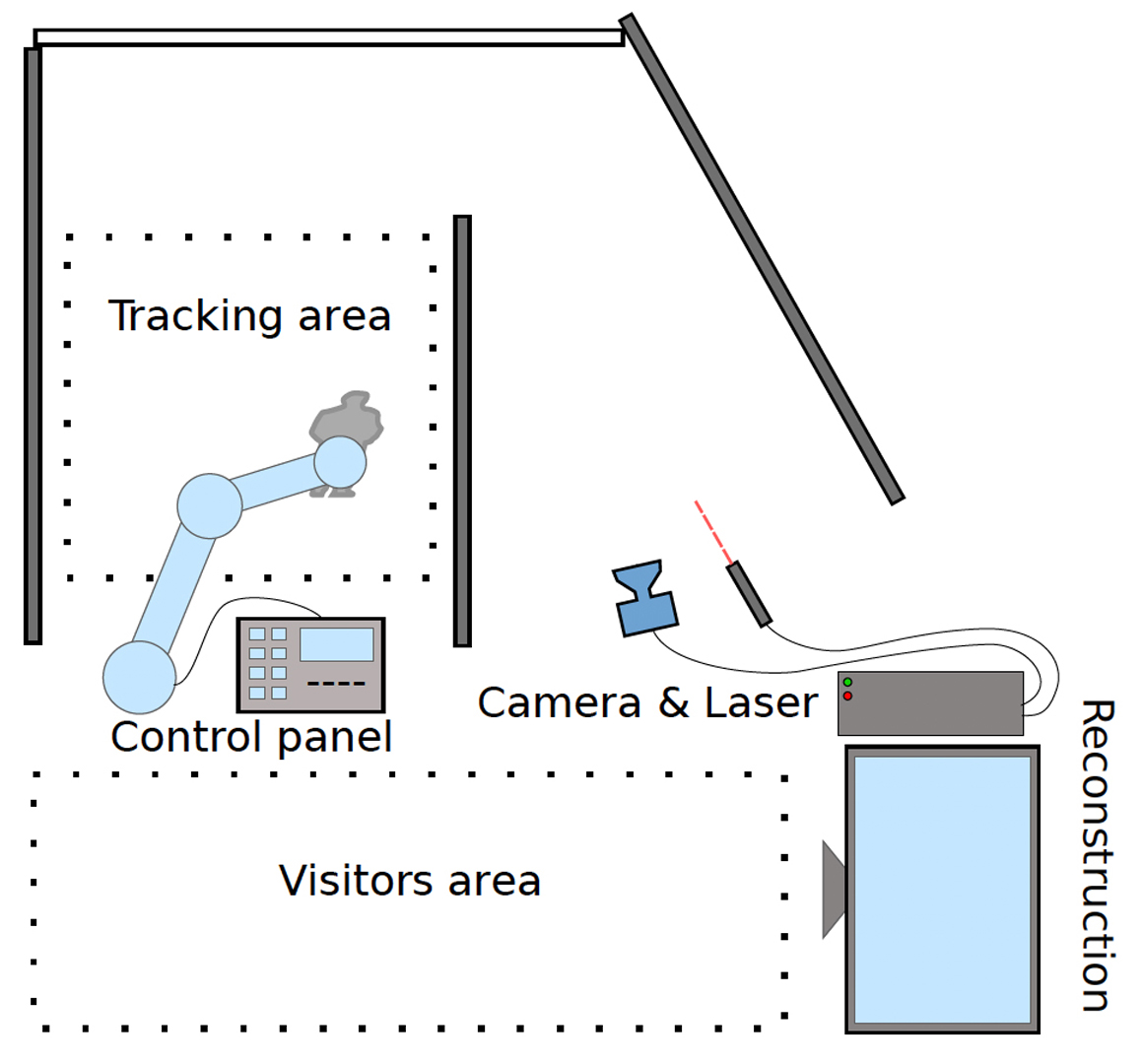
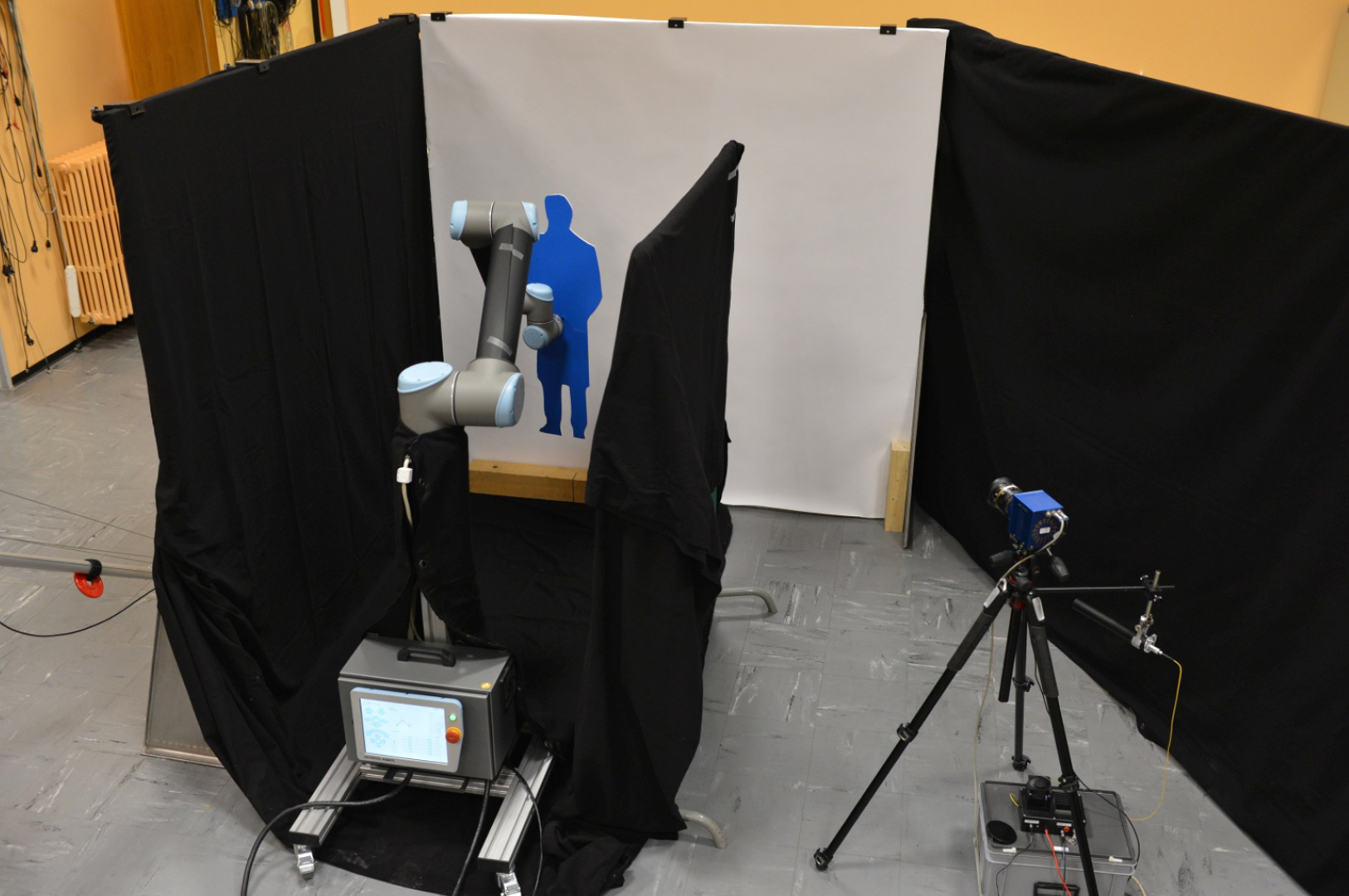
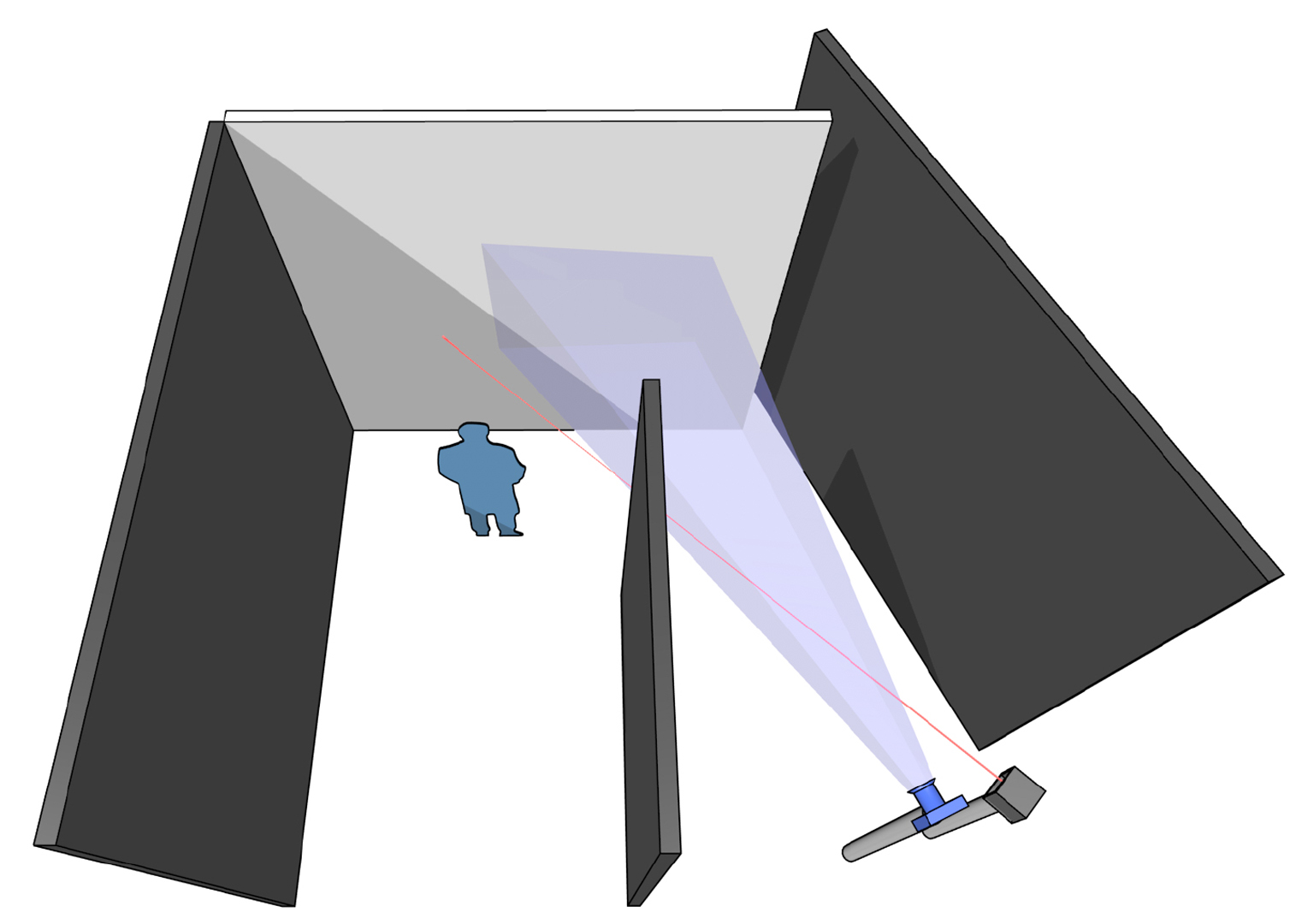
The sensing of objects hidden behind an occluder is a fascinating emerging area of research and expected to have an impact in numerous application fields such as automobile safety, remote observation or endoscopy. In the past, this problem has consistently been solved with the use of expensive time-of-flight technology and often required a long reconstruction time. Our system is the first one that only relies on o.-the-shelf intensity cameras and lasers. To achieve this, we developed a novel analysis-by-synthesis scheme which utilizes the output of a specialized renderer as input to an optimizer to perform the reconstruction. In the exhibition, visitors can freely move the object around in the hidden scene, while our camera setup on the other side of the wall reconstructs the object position and orientation in real time. We hope that this first hand experience will spread excitement about possible future applications of this new technology.
References:
Fadel Adib and Dina Katabi. 2013. See through Walls with WiFi! SIGCOMM Comput. Commun. Rev. 43, 4 (Aug. 2013), 75–86. DOI:h.p://dx.doi.org/10.1145/2534169.
2486039
Genevieve Gariepy, Francesco Tonolini, Robert Henderson, Jonathan Leach, and Daniele Faccio. 2016. Detection and tracking of moving objects hidden from view. Nature Photonics 10, 1 (2016).
Richard Gray. 2015. MailOnline. http://www.dailymail.co.uk/sciencetech/article- 3349556/Spy-camera-CORNERS-Technology-track-people-sight-spot-cars-blindjunctions. html. (2015).
Felix Heide, Lei Xiao,Wolfgang Heidrich, and Matthias B. Hullin. 2014. Diffuse Mirrors: 3D Reconstruction from Diffuse Indirect Illumination Using Inexpensive Time-of- Flight Sensors. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR) (2014).
A. Kirmani, T. Hutchison, J. Davis, and R. Raskar. 2009. Looking around the corner using transient imaging. In Proc. ICCV. 159–166.
Jonathan Klein, Christoph Peters, Jaime Martn, Martin Laurenzis, and Matthias B. Hullin. 2016. Tracking objects outside the line of sight using 2D intensity images. Scientific Reports 6 (08 2016). http://www.nature.com/articles/srep32491
Nikhil Naik, Shuang Zhao, Andreas Velten, Ramesh Raskar, and Kavita Bala. 2011. Single View Reflectance Capture Using Multiplexed Scattering and Time-of-flight Imaging. ACM Trans. Graph. 30, 6, Article 171 (Dec. 2011), 10 pages. DOI:h.p: //dx.doi.org/10.1145/2070781.2024205
A. Velten, T. Willwacher, O. Gupta, A. Veeraraghavan, M.G. Bawendi, and R. Raskar. 2012. Recovering three-dimensional shape around a corner using ultrafast time-of- flight imaging. Nature Communications 3 (2012), 745.
Keyword(s):
- non-line-of-sight vision
- intensity based
- analysis by synthesis
- active imaging
- real time
Additional Images: