“NONA-Vision” by Iwata, Yano, Tsuzuki, Nakaizumi, Yoshioka, et al. …
Notice: Pod Template PHP code has been deprecated, please use WP Templates instead of embedding PHP. has been deprecated since Pods version 2.3 with no alternative available. in /data/siggraph/websites/history/wp-content/plugins/pods/includes/general.php on line 518

Conference:
- SIGGRAPH 2002
-
More from SIGGRAPH 2002:
Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345

Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345


Type(s):
E-Tech Type(s):
- Displays & Projection
Entry Number: 73
Title:
- NONA-Vision
Presenter(s):
Description:
Abstract
The NONA-Vision is a high -resolution, wide-angle video capture and projection system. The display is composed of nine rear-projection screens. Images for the nine screens are captured by a specialized camera-head, in which the optical centers of nine video cameras are located at the identical position.
1 Purposes and goals of the project
Visual immersion plays an important role in virtual environment or telepresence. A large screen can cover a wide-angle field of view. Such a screen needs a large number of pixels. Current projectors have good resolution,, and graphics workstations have the ability to display real-time computer graphics. However, high-resolution images of the real world are difficult to display. An HDTV camera has the highest resolution for video image, although its pixels aren’t sufficient to cover the full field of view of human vision. Moreover, wireless transmission of HDTV images isn’t available in general. The NONA-Vision aims to achieve high-resolution video images of remote environments by using specialized multiple cameras.
2 Technical Innovation of the Project
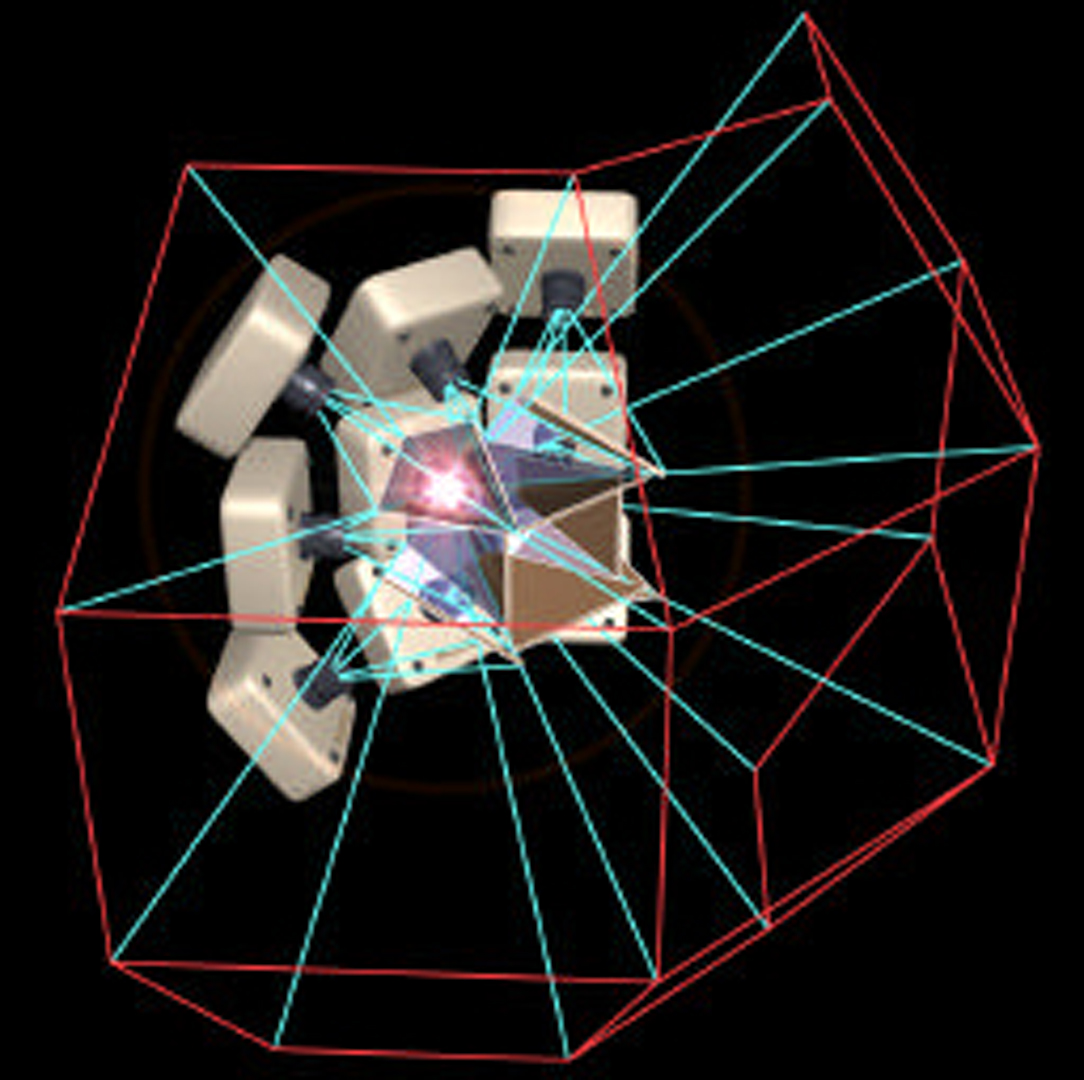
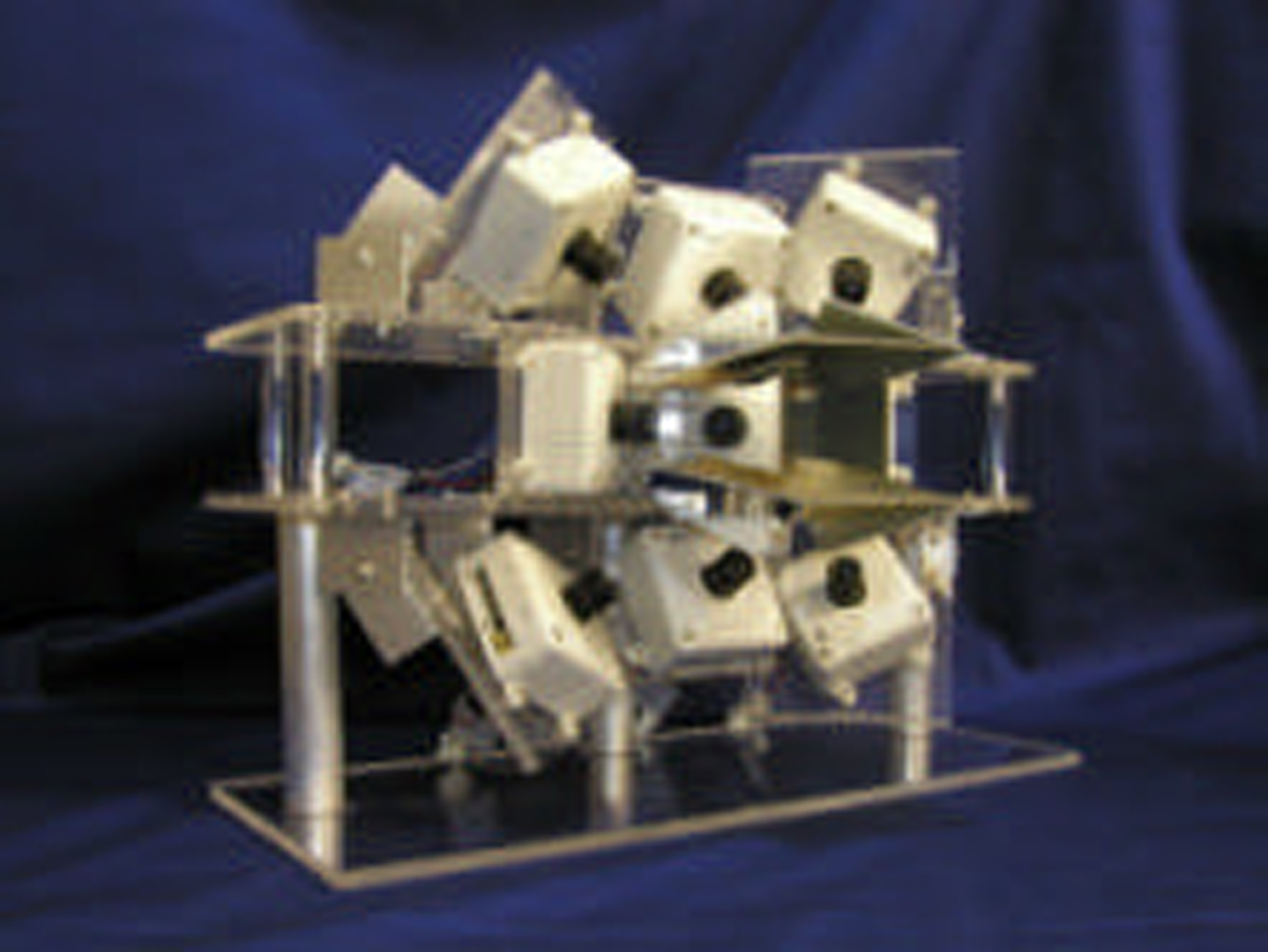
The NONA-Vision is a high-resolution, wide-angle video capture and projection system. The display is composed of nine rear-projection screens. Images for the nine screens are captured by nine video cameras. Mirrors are used to place optical centers of the cameras at the same position. Optical centers of the nine cameras are located at a single point by using eight mirrors. This configuration provides the images on the screen without distortion. Video images of each camera are transmitted using a UHF transmitter.
The display is mounted on a 360 degree turn table. Rotational motion of the viewer is measured by a position sensor. The display rotates around the viewer according to his/her motion, so that it displays a full-surround image.
3 Larger implications of the project beyond this
demonstration phase
Potential applications of the NONA-Vision are teleoperation and virtual travel. A wide-angle image is useful for remote robots. Scenes of an un-known environment are difficult to recognize by using the narrow field of view of a conventional camera-head. The NONA-Vision provides a good sense of presence of remote sites.
Keyword(s):
- immersive projection display
- telepresence
- video image
Additional Images: