
“MoleBot: Mole in a Table” by Lee, Kim, Lee, Shin and Lee
Conference:
- SIGGRAPH 2011
-
More from SIGGRAPH 2011:


Type(s):
Entry Number: 09
Title:
- MoleBot: Mole in a Table
Presenter(s):
Description:
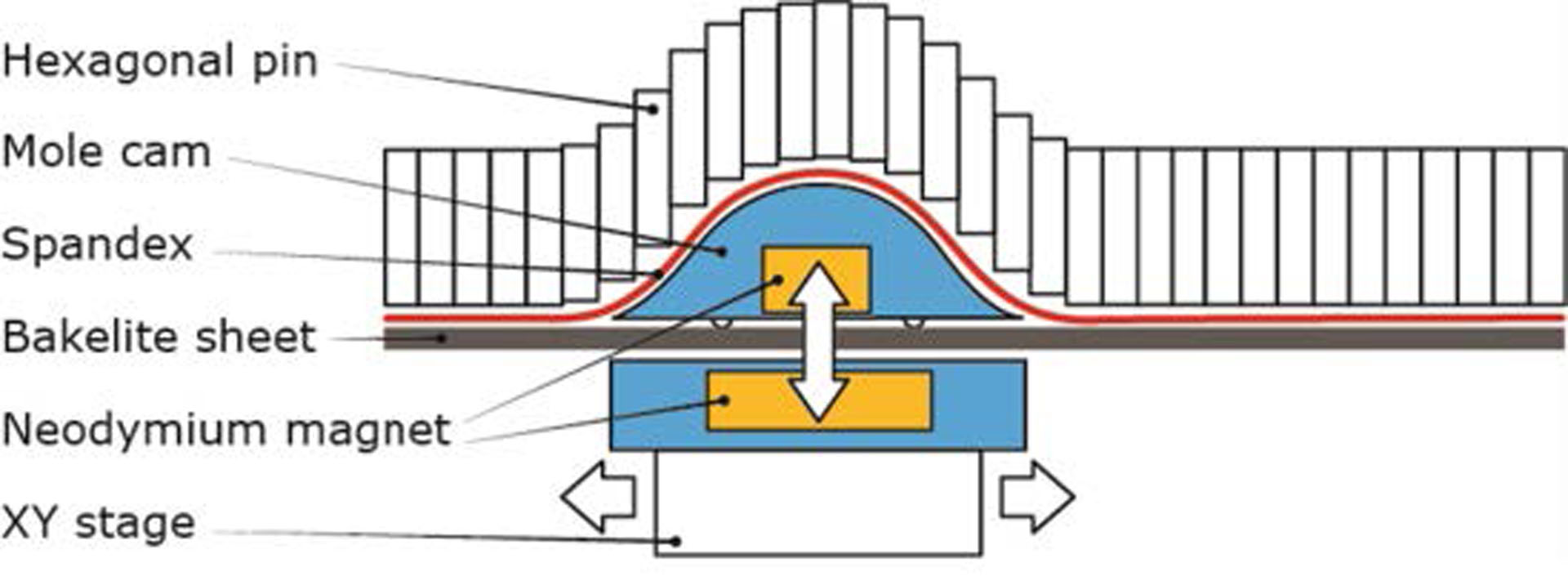
What would it be like to have a mole live under your table and push around objects on the table surface? We have developed MoleBot, a robotic mole living in a coffee table that interacts with small items laid on the table surface. The MoleBot projects a molehill on the surface, which moves simultaneously with the movement of the MoleBot. In order to make the molehill move with fluidity, the table surface needs to be rigid yet flexible. Various techniques used in shape display and organic user interfaces of previous projects (Feelex, Pop Up!, Lumen1, Relief2, and HypoSurface) were assessed to determine the feasibility of the molehill idea. The projects adopted servo motors, shape memory alloys, electric slide potentiometers, and pneumatic actuators. However, in generating the MoleBot, these techniques were unable to concurrently provide the necessary speed of actuation, resolution, and pixel size for desired level of physical interactivity with objects on the surface. As a result, we conceived a new way to implement this concept.
References:
Ivan Poupyrev, Tatsushi Nashida, Shigeaki Maruyama, Jun Rekimoto, and Yasufumi Yamaji. 2004. Lumen: interactive visual and shape display for calm computing. In ACM SIGGRAPH 2004 Emerging technologies, ACM, New York, NY, USA, 17-.
Daniel Leithinger and Hiroshi Ishii. 2010. Relief: a scalable actuated shape display. In Proceedings of the fourth international conference on Tangible, embedded, and embodied interaction (TEI ’10). ACM, New York, NY, USA, 221-222.
Additional Images:

