
“MDS (Mobile-Dexterous-Social) Robot for Human-Robot Teamwork” by Breazeal, Siegel, Berlin, Gray, Grupen, et al. …
Conference:
- SIGGRAPH 2008
-
More from SIGGRAPH 2008:


Type(s):
Entry Number: 25
Title:
- MDS (Mobile-Dexterous-Social) Robot for Human-Robot Teamwork
Presenter(s):
Description:
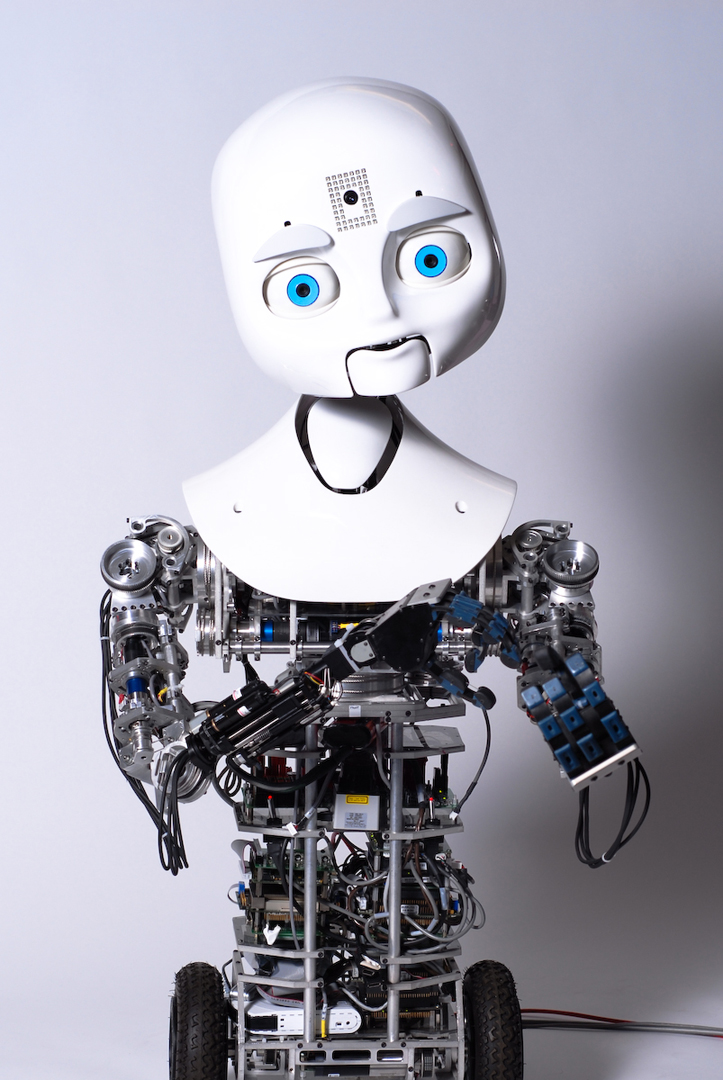
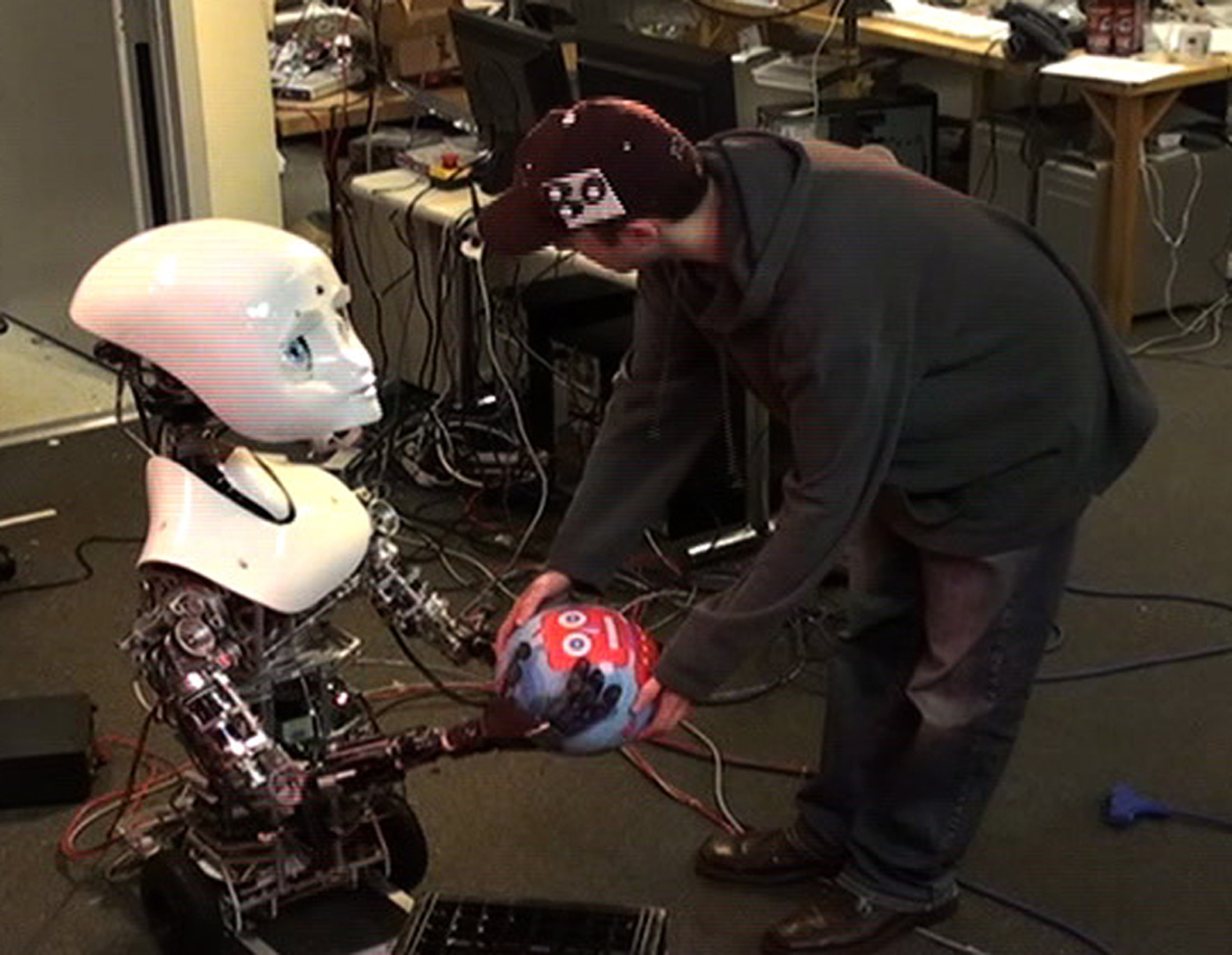
The Personal Robots Group at the MIT Media Lab (URL: robotic.media.mit.edu) is leading the development of a new class of robots that feature a novel combination of mobility, dexterity, and human-centric communication and interaction skills that sets a new standard for research into personal robots. We refer to this class of robots as ”MDS” for Mobile-Dexterous-Social.
The purpose of this platform is to support research and education goals in human-robot interaction and mobile manipulation with applications that require the integration of these abilities. In particular, our research aims to develop personal robots that work with people as capable teammates to assist in eldercare, healthcare, domestic chores, and other physical tasks that require robots to serve as competent members of human-robot teams. The robot’s small, agile design is particularly well suited to human-robot interaction and coordination in human living spaces. Our collaborators include the Laboratory for Perceptual Robotics at the University of Massachusetts at Amherst, Xitome Design, Meka Robotics, and digitROBOTICS.
Additional Images:
Acknowledgements:
The development of the MDS robot was funded by an ONR DURIP Award N00014-06-1-0516 and a Microsoft Research Grant. Cosmetic design by Fardad Faridi. Please contact Xitome Design for a commercial version of the MDS, digitROBOTICS for a commercial version of the uBot-5 platform, and Meka Robotics for a commercial version of the hands.