“Gesture-World Technology” by Hoshino, Tomida and Tanimoto
Conference:
- SIGGRAPH 2010
-
More from SIGGRAPH 2010:


Type(s):
Entry Number: 12
Title:
- Gesture-World Technology
Presenter(s):
Description:
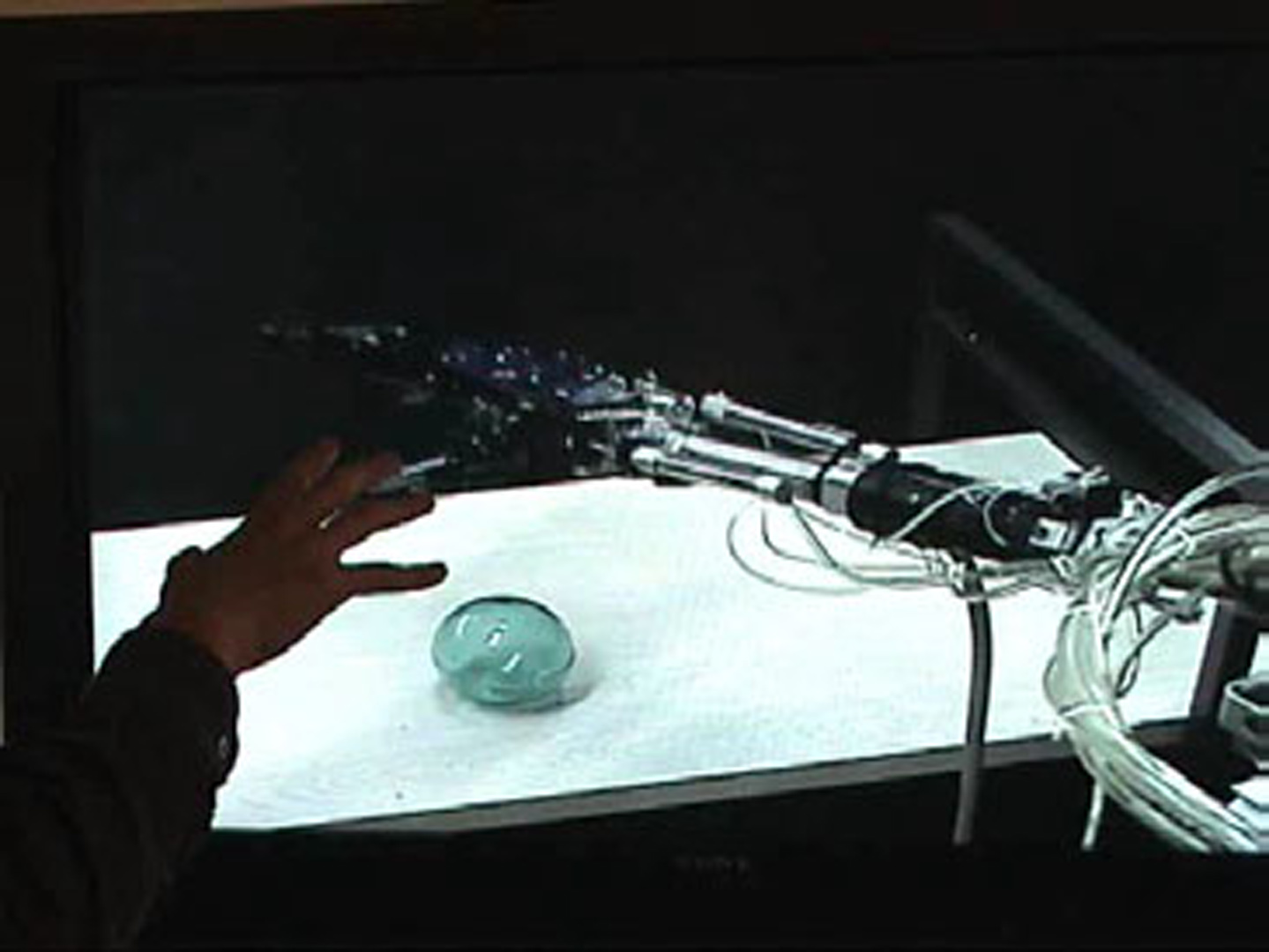
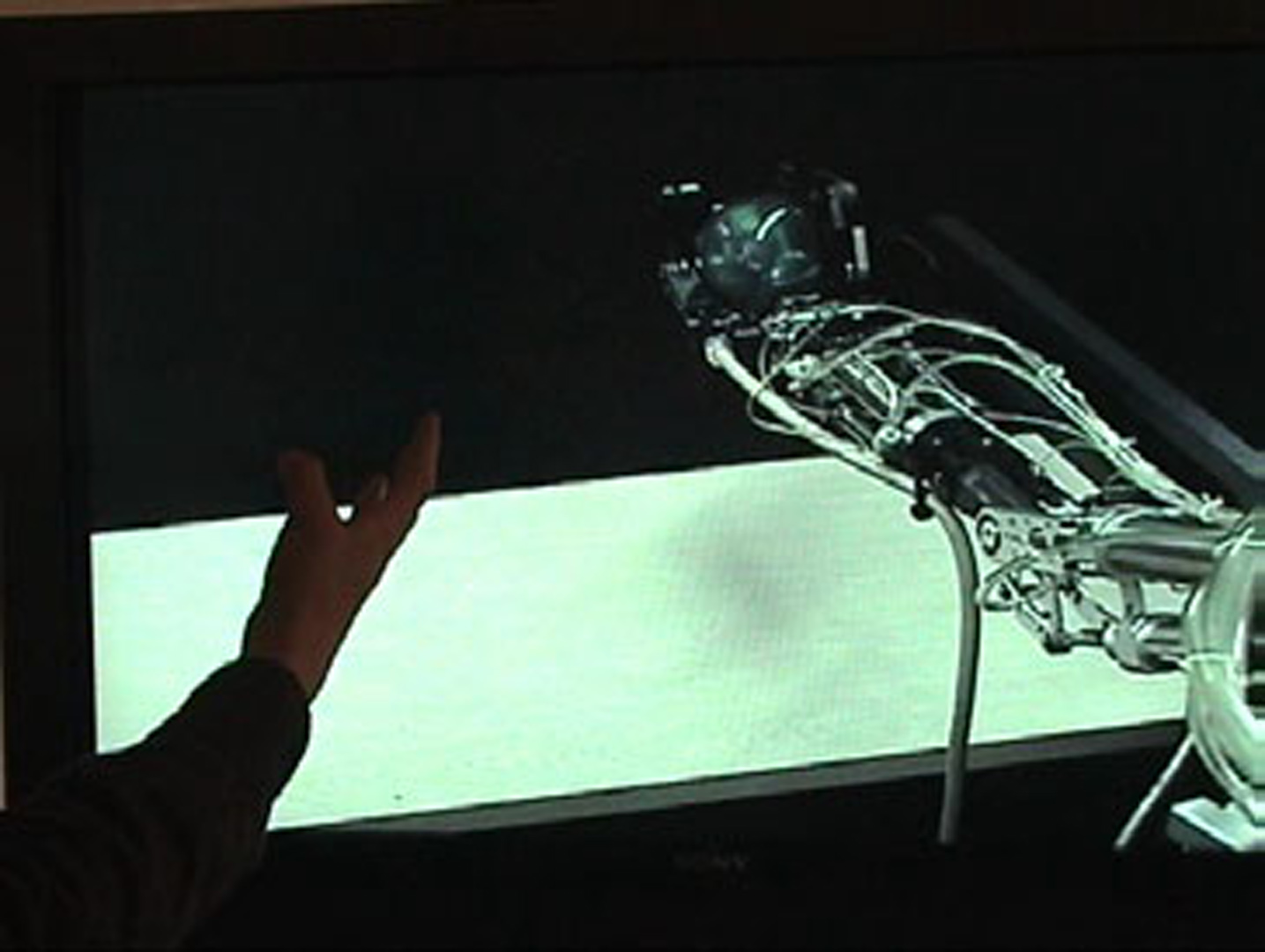
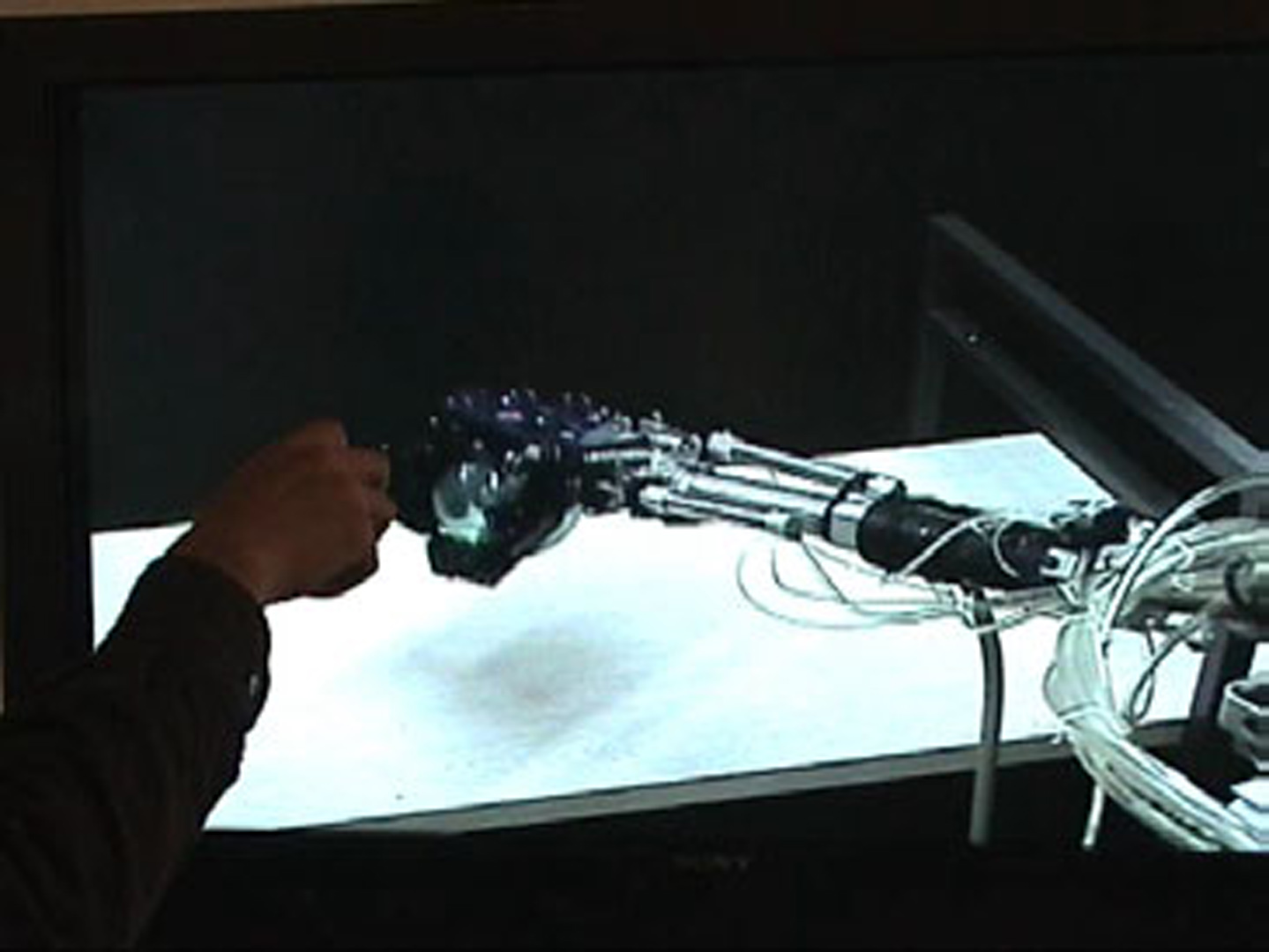
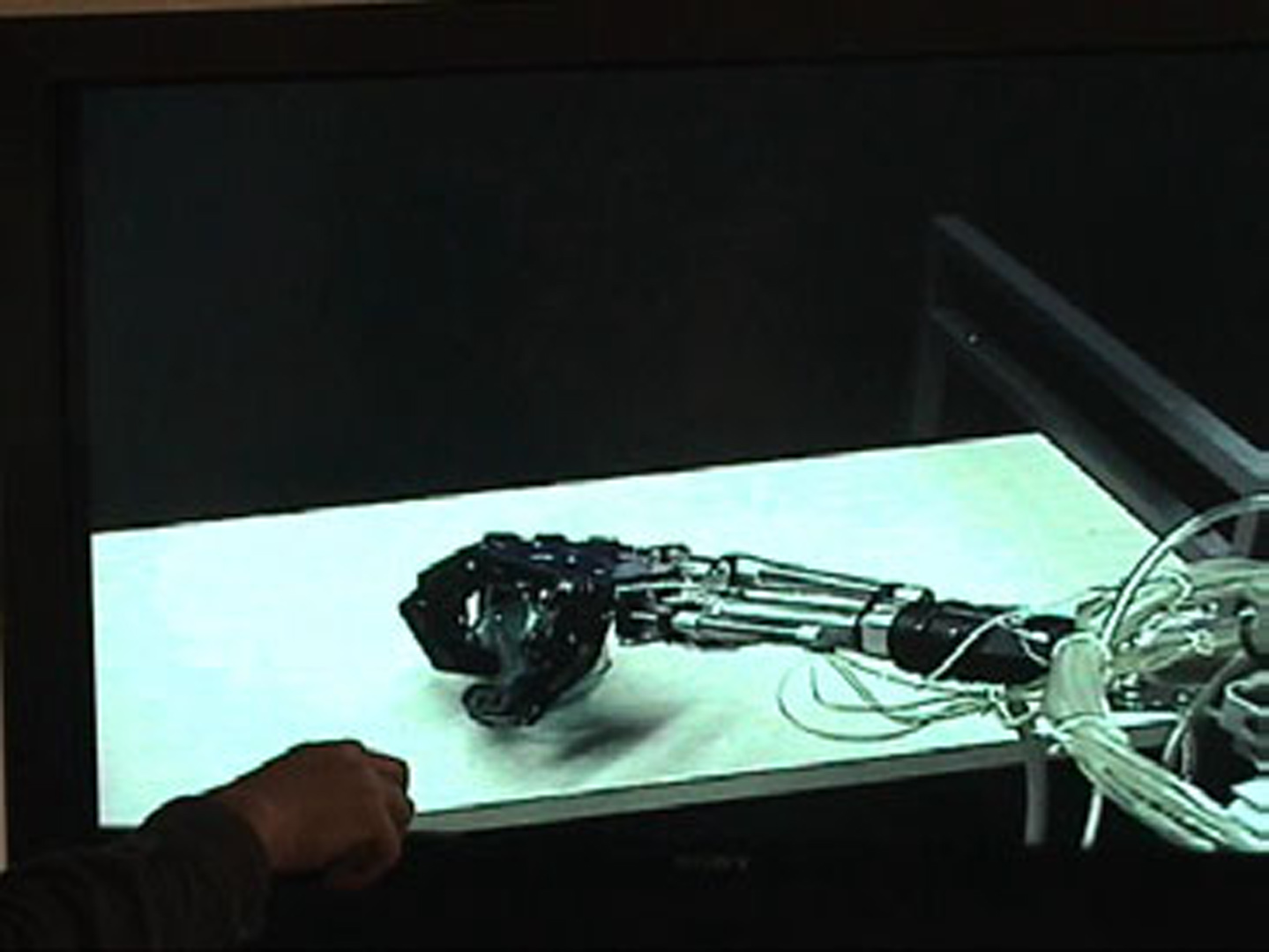
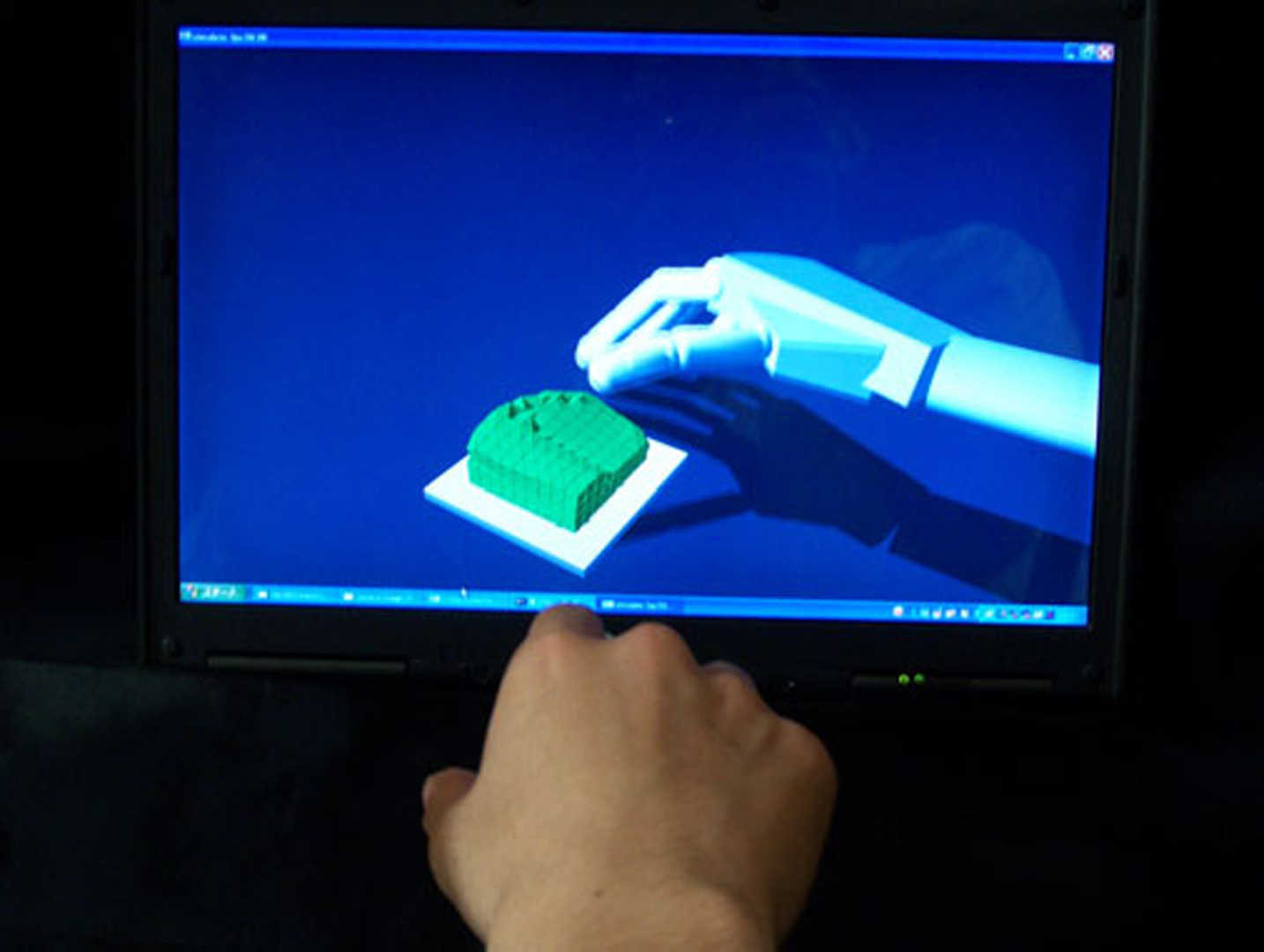
This technology allows people to control devices such as computers, communications devices, household appliances, and robots by means of everyday gestures without using sensors or controllers, which employs the high-speed and high-accuracy computer vision technology capable of estimating the human hand and arm poses captured by a compact high-speed camera.
The technology behind our exhibit will change standard practices with regard to the mechanical operation of equipment such as information devices and robots. Because fingers are articulated structures, they can assume many complex shapes, which often result in the problem of self-occlusion. Despite their small size relative to the rest of the body, fingers are also capable of moving in a wide 3D space, due to movements of the arms or the body. For these reasons, it has not been easy to estimate hand poses by non-contact means, using a monocular camera or a pair of cameras at close-range. In recent years, however, high-speed cameras have become more compact and inexpensive. Therefore, if we can achieve fast and accurate 3D hand pose estimation, using only camera images (in other words, without sensors) and without the need to strictly fix the camera position, we expect that the technology will be applied in a wide range of areas. Examples of such applications could include gesture-based computer operation, virtual games, remote control without a remote controller, digital archiving of artisan skills, and remote robot control. The need to attach sensors or find and use special controllers will disappear.
Other Information:
References
[1] K.Hoshino and T.Tanimoto: Real time search for similar hand images from database for robotic hand control, IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, E88-A, 10, pp.2514-2520, 2005.
[2] K.Hoshino and M.Tomida: Copycat arm, SIGGRAPH 2008, New Tech Demos, Full Conference DVD-ROM, 2164, p.1, 2008.
[3] K.Hoshino and M.Tomida: 3D hand pose estimation using a single camera for unspecified users, Journal of Robotics and Mechatronics, 21, 6, pp.749-757, 2009.
Additional Images: