
“GelForce” by Kamiyama, Kajimoto, Vlack, Kawakami, Mizota, et al. …
Conference:
- SIGGRAPH 2004
-
More from SIGGRAPH 2004:


Type(s):
Entry Number: 04
Title:
- GelForce
Presenter(s):
Description:
Introduction
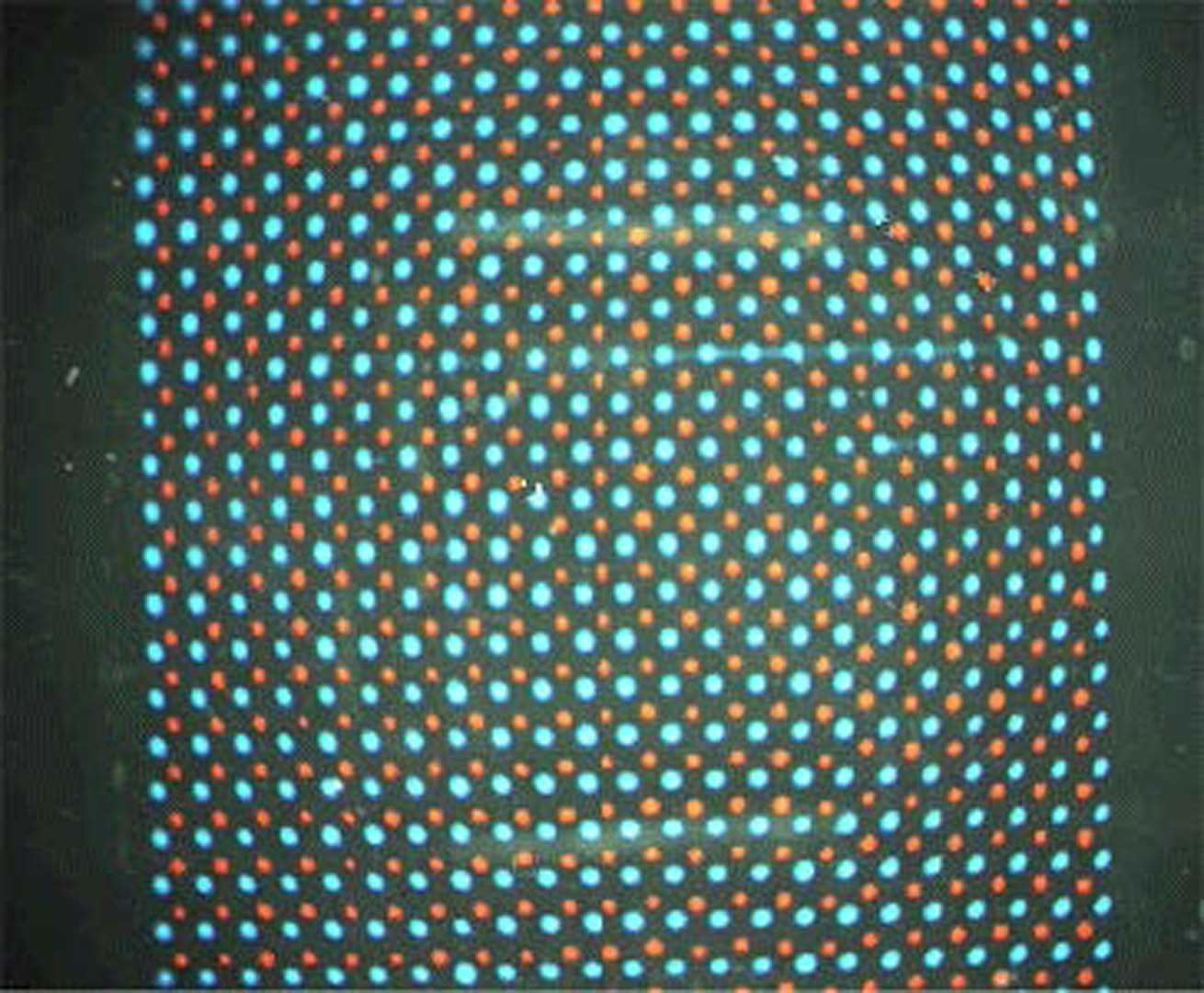
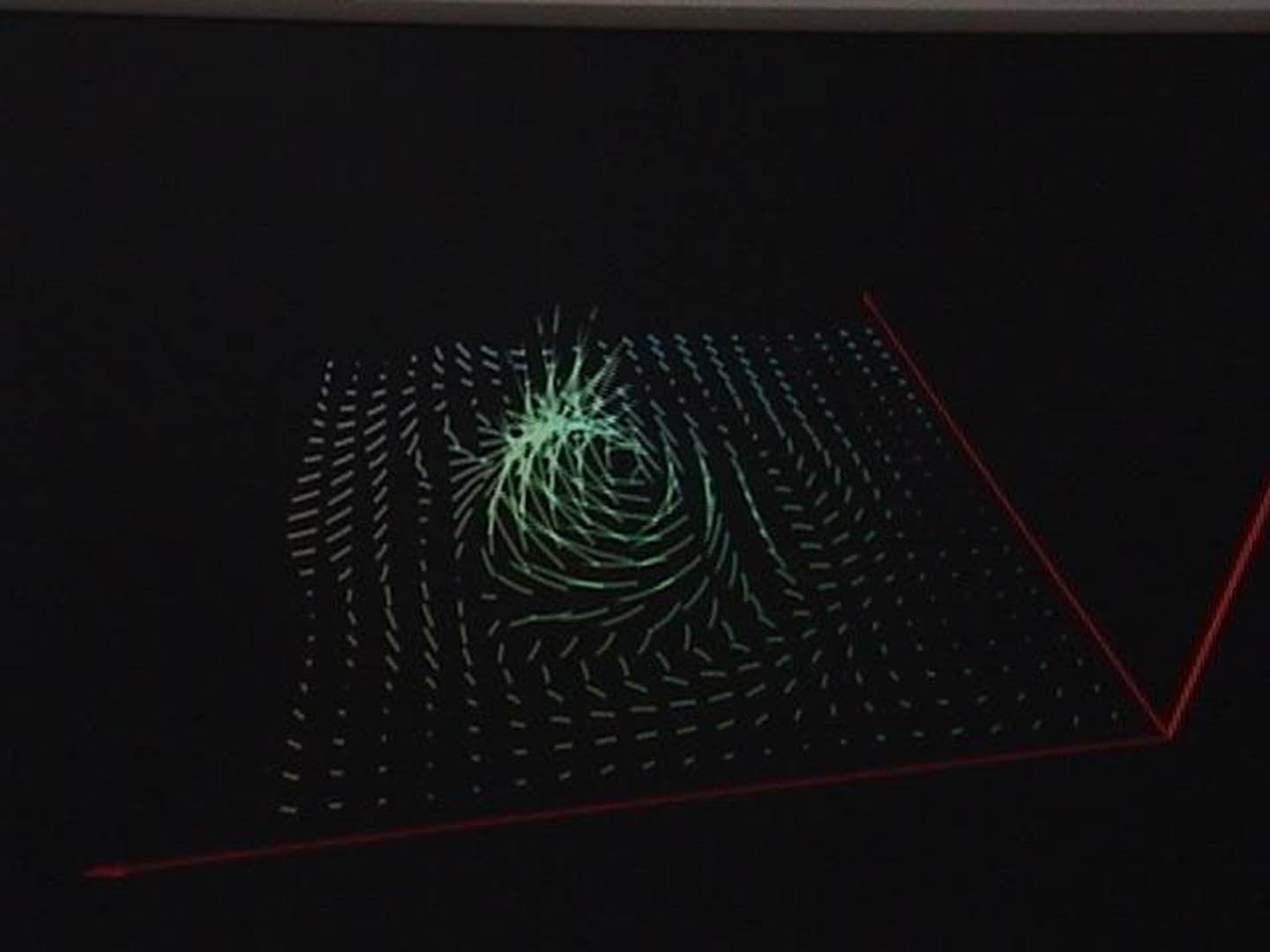
GelForce is a novel type of interface that measures the distribution of both the magnitude and direction of force. The sensor is composed of a transparent elastic body, two layers of blue and red markers and a CCD camera. Force vectors are calculated from the captured movement of the markers.
The history of the force sensor is ancient, yet it has always been exceedingly difficult to obtain the distribution of force vectors, because nearly all existing sensing technologies use some sort of sensing unit for which electric resistance or capacitance depends on force. For sensors of this type intended to measure the distribution of force vectors, the wiring becomes extremely complex, and the size of the unit expands dramatically as the amount of measured information is increased. On the other hand, the optical system of our developed sensor is simple, and various applications are therefore possible such as tactile sensation for a robotic fingertip, and a versatile force-based computer interface.