
“FingerSight: Fingertip Control and Haptic Sensing of the Visual Environment” by Galeotti, Horvath, Klatzky, Nichol, Siegel, et al. …
Conference:
- SIGGRAPH 2008
-
More from SIGGRAPH 2008:


Type(s):
Entry Number: 16
Title:
- FingerSight: Fingertip Control and Haptic Sensing of the Visual Environment
Presenter(s):
Description:
Many devices that transfer input from the visual environment to another sense have been developed. The primary assistive technologies in current use are white canes, guide dogs, and GPSbased technologies. All of these facilitate safe travel in a wide variety of environments, but none of them are useful for straightening a picture frame on the wall or finding a cup of coffee on a counter-top. Tactile display screens and direct nerve stimulation are two existing camera-based technologies that seek to replace the more general capabilities of vision. Notably, these methods preserve a predetermined map between the image captured by a camera and a spatially fixed grid of sensory stimulators. Other technologies use fixed cameras and tracking devices to record and interpret movements and gestures. These, however, operate in a limited space and focus on the subject, rather than the subject’s interrogation of his environment. With regard to haptic feedback devices for the hand, most existing devices aim to simulate tactile exploration of virtual objects.
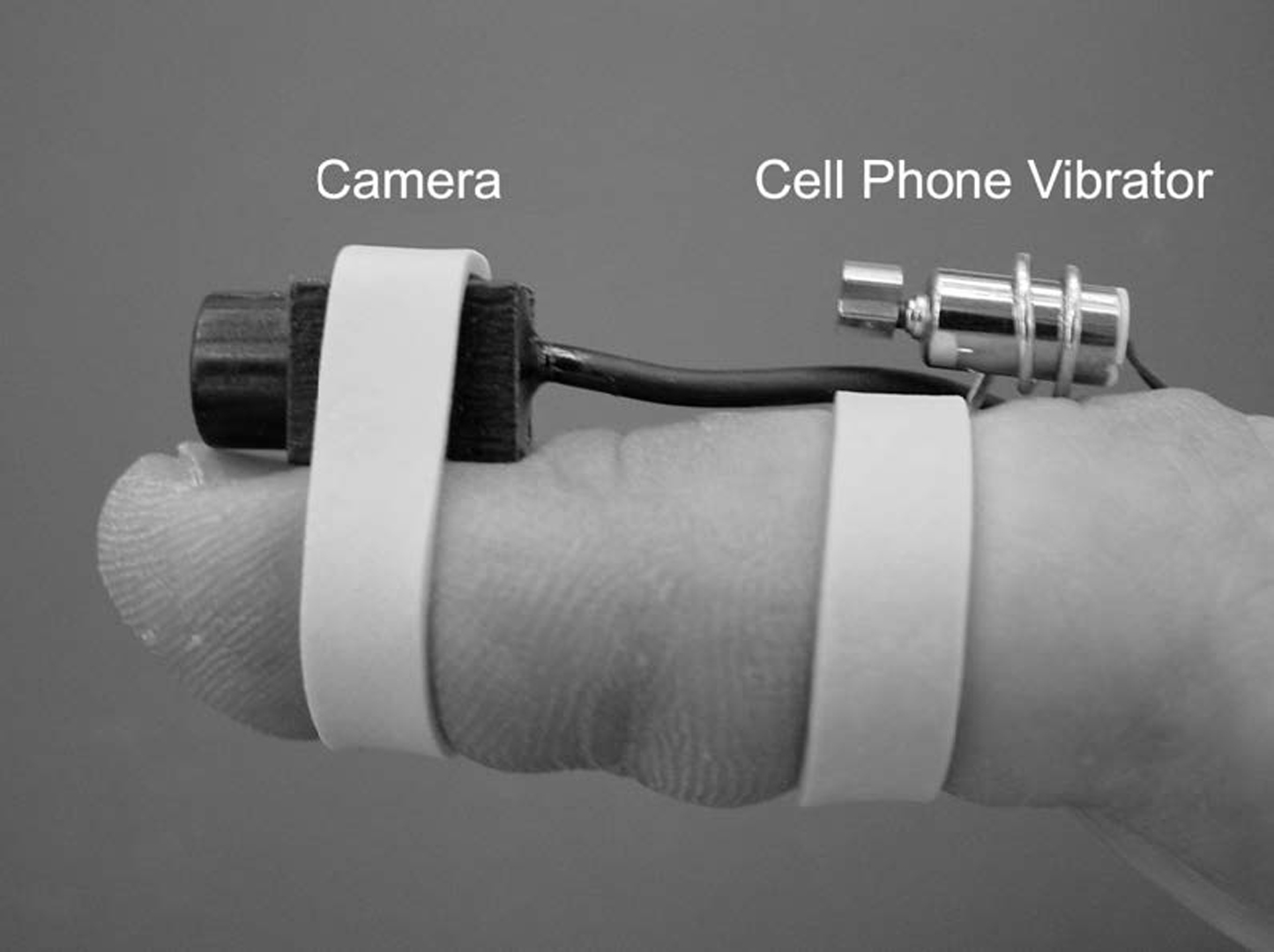
FingerSight is the underlying concept for a visual sensing device with haptic feedback that allows users to both actively interrogate and sense the 3D environment, and to manipulate specific aspects of the environment by gesture. FingerSight implementations are not necessarily limited to a specific, predetermined environment. The original goal of FingerSight was to aide the visually impaired. Visual sensing combined with haptic feedback allows users to receive additional information about their surroundings without interfering with auditory cues. The introduction of control into FingerSight has expanded the potential target population to the general public, who could make use of it as an intuitive and possibly even enjoyable new form of remote control. The current model, shown in Figure 1, utilizes a small finger-mounted video camera to track graphical controls on a computer screen and provides vibrotactile feedback to alert the user when they have locked onto a control.