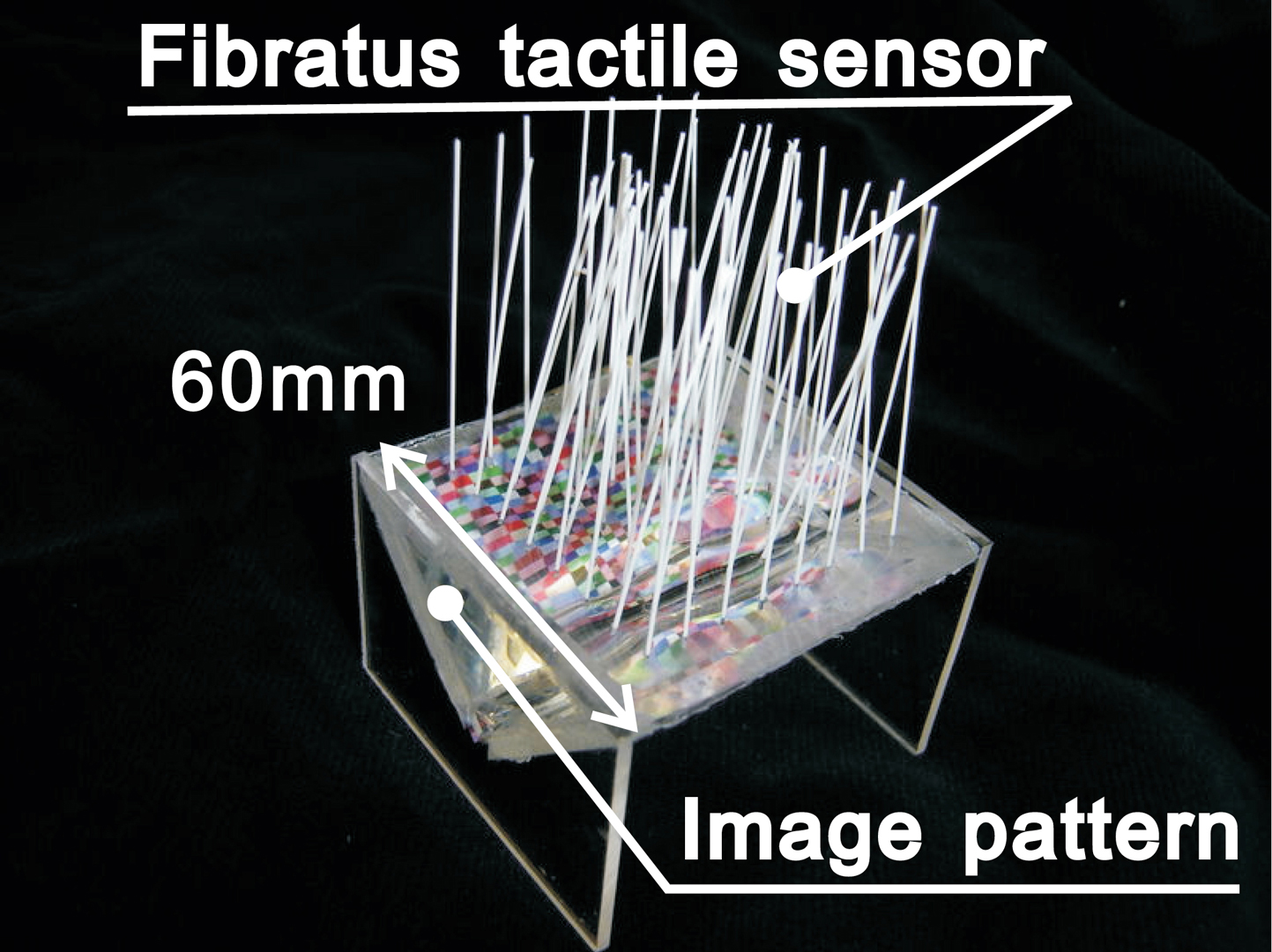
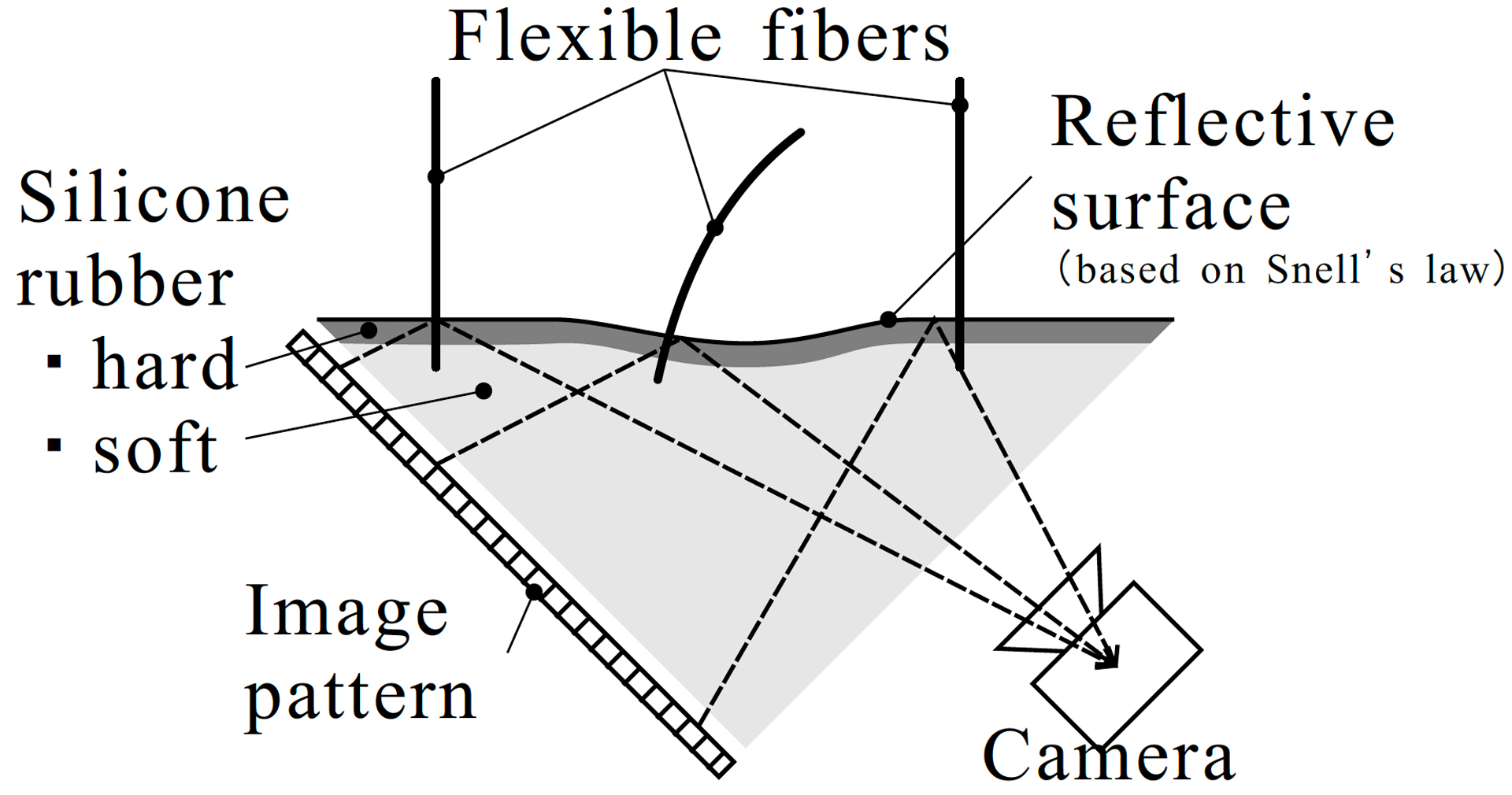
“Fibratus tactile sensor using reflection on an optical lever” by Saga, Kuroki, Kawakami and Tachi

Conference:
- SIGGRAPH 2007
-
More from SIGGRAPH 2007:


Type(s):
Entry Number: 05
Title:
- Fibratus tactile sensor using reflection on an optical lever
Presenter(s):
Description:
Abstract
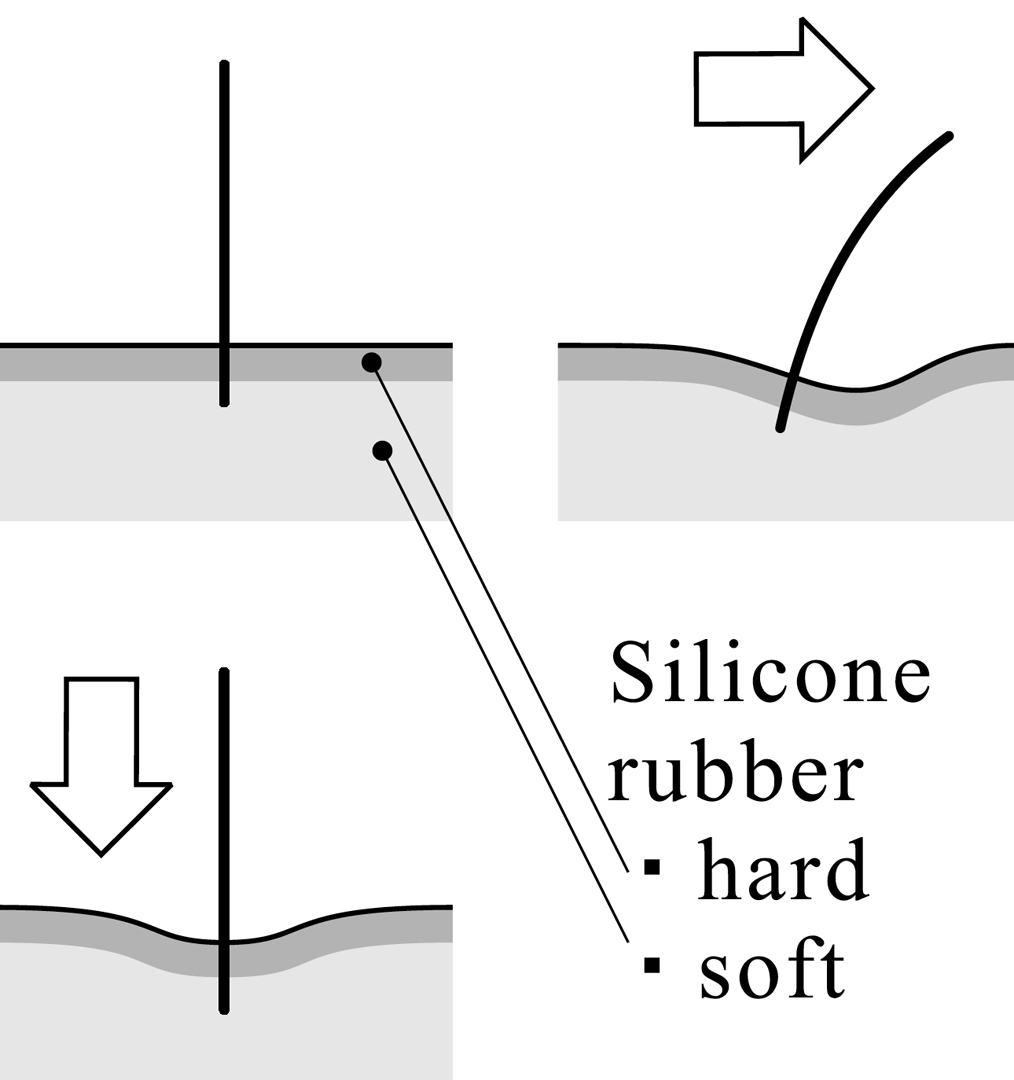
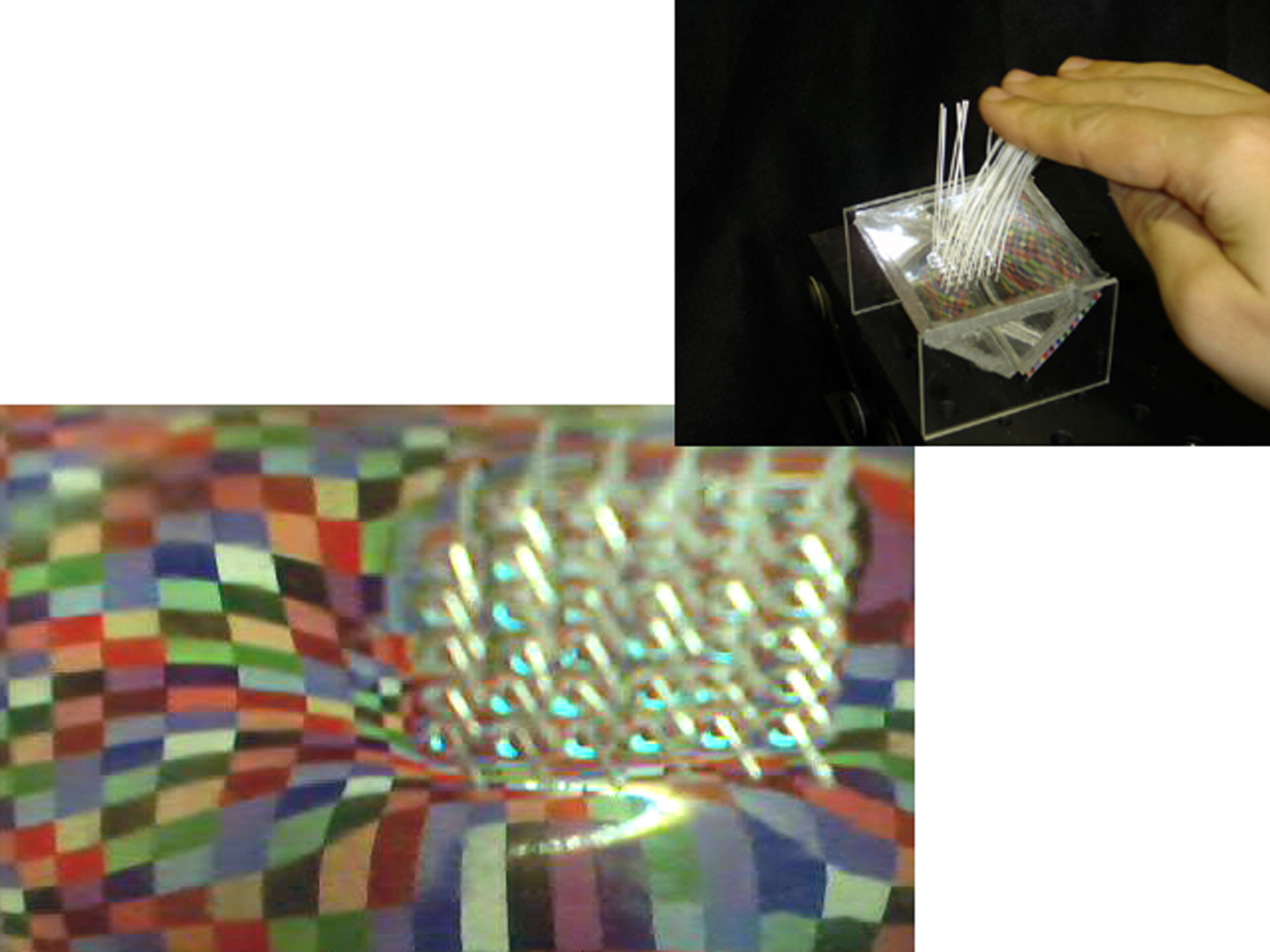
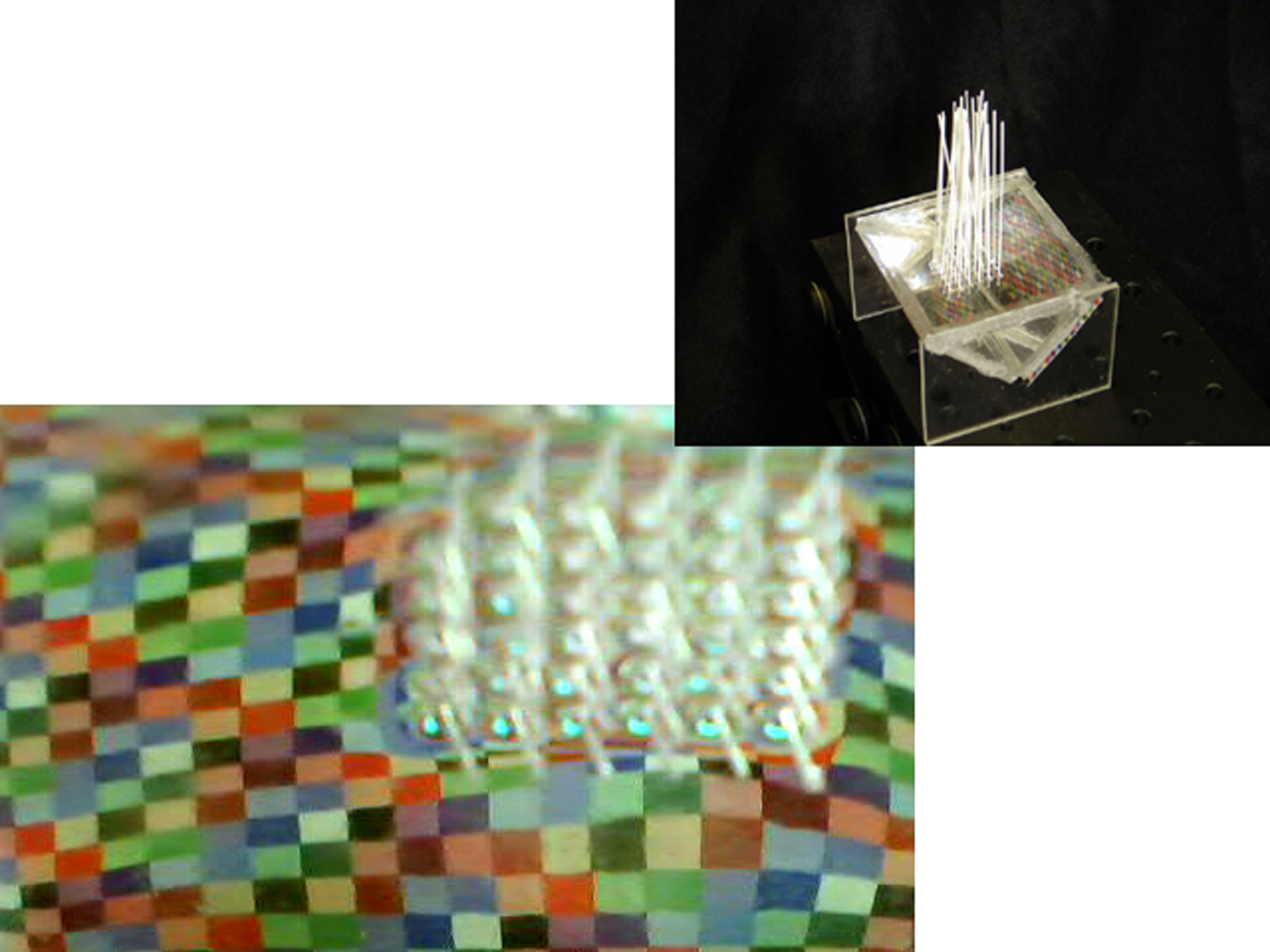
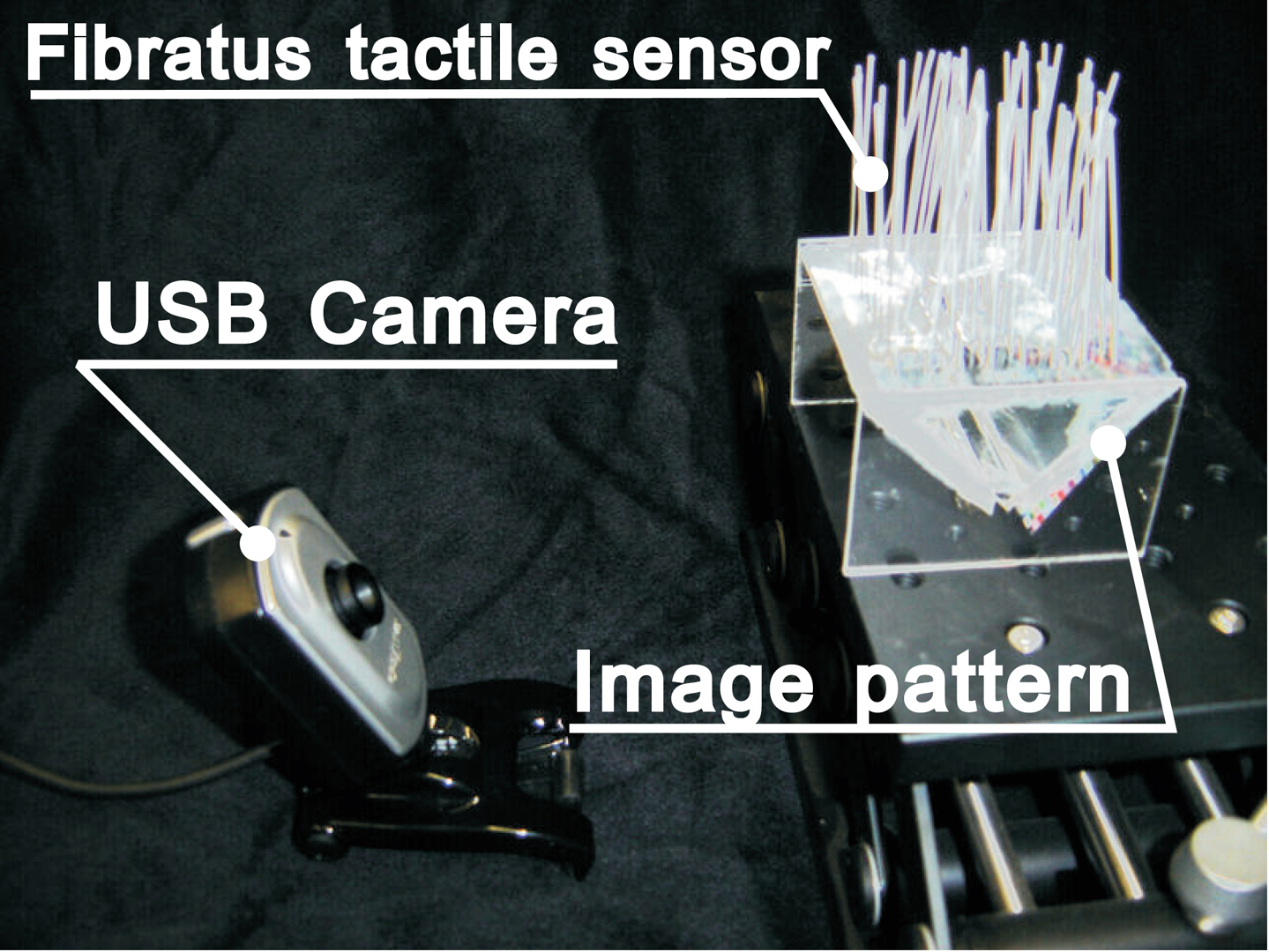
Among several tactile sensors in use currently, none can evaluate the sense of gentle touch. We have developed a fibratus tactile sensor that utilizes the property of reflection. This sensor enables to evaluate the sense of gentle touch. We propose a new interface de- vice that employs this fibratus tactile sensor.
Other Information:
References
BEGEJ, S. 1984. An optical tactile array sensor. SPIE Intelligent Robotics and Computer Vision 521, 271–280.
BL AUTOTEC LTD. BL NANO Sensor.
KAMIYAMA, K., VLACK, K., KAJIMOTO, H., KAWAKAMI, N., AND TACHI, S. 2005. Vision-Based Sensor for Real-Time Measuring of Surface Traction Fields. IEEE Computer Graphics & Applications Magazine, 68–75.
NITTA CORPORATION. Flexi Force.
SAGA, S., KAJIMOTO, H., AND TACHI, S. 2006. High-resolution tactile sensor using the deformation of a reflection image. Sensor Review 27, 35–42.
SHIN-ETSU CHEMICAL CO., LTD. 2 liquid-type RTV rubber KE109.
YAMADA, K., GOTO, K., NAKAJIMA, Y., KOSHIDA, N., AND SHINODA, H. 2002. A sensor skin using wire-free tactile sensing elements based on optical connection. In SICE 2002. Proceedings of the 41st SICE Annual Conference, The Society of Instrument and Control Engineers. (SICE), Tokyo, Japan, vol. 1, 131–4.
Keyword(s):
- tactile sensor
- fiber
- optical measurement
- optical lever
Additional Images: