“FEELEX” by Iwata, Kawamura, Nakaizumi, Yanoi and Abe

Conference:
- SIGGRAPH 2001
-
More from SIGGRAPH 2001:


Type(s):
E-Tech Type(s):
- Haptics
Entry Number: 08
Title:
- FEELEX
Presenter(s):
Description:
- Our haptic interfaces allow users to touch virtual objects at a single point or a group of points. This hardware configuration cannot create realistic sensations comparable to hand manipulation in the real world.
- Visual images are combined with haptic interfaces using conventional CRT or projection screens, so users have to integrate inputs from two different displays.
In developing and demonstrating haptic interfaces that generate skin and muscle sensation, including sense of touch, weight, and rigidity, we have found that some of them do not convey the presence of virtual objects through haptic sensation. There are two reasons for this phenomenon:
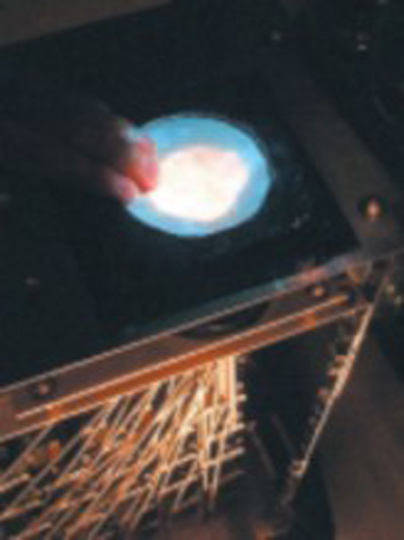
We designed a new haptic-visual display to overcome these limitations. The device is composed of a flexible screen, an array of actuators, and a projector. The flexible screen is deformed by the actuators to simulate shapes of virtual objects. Images of the virtual objects are projected on the surface of the flexible screen. This configuration enables users to touch the images directly with their bare hands. The actuators are equipped with force sensors to measure force applied by users. The virtual object’s hardness is determined by the relationship between the measured force and the position of the actuators.
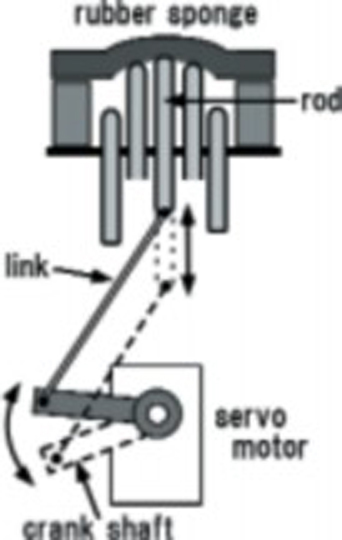
The newest FEELEX has a high-resolution haptic surface. The distance between the actuator rods is 8 mm. This resolution enables users to hit at least one actuator when they touch any position on the screen. The screen size (50 mm X 50 mm) allows users to touch the surface with three fingers. In order to realize 8 mm resolution, a piston-crank mechanism is employed for the linear actuator.
Since the motor is much larger than 8 mm, the motor should be placed at an offset position from the rod. A piston-crank mechanism can easily achieve this offset position. The flexible screen is made of rubber sponge supported by 23 rods. The rods push the rubber sponge to increase the hardness of virtual objects. This mechanism has an advantage in presentation of soft objects. The user feels a hard object submerged in a soft object. The actuators have force sensors that detect applied force from the user. If the user pushes the hard object, it moves according to the pressure. The device can be applied to a palpation simulator, a haptic touch screen, or virtual clay.
intron.kz.tsukuba.ac.jp
Additional Images: