
“BUZZ: Measuring and Visualizing Conference Crowds” by Wren, Ivanov, Leigh and Westhues
Conference:
Experience Type(s):
Title:
- BUZZ: Measuring and Visualizing Conference Crowds
Entry Number: 02
Organizer(s)/Presenter(s):
Description:
1. Introduction
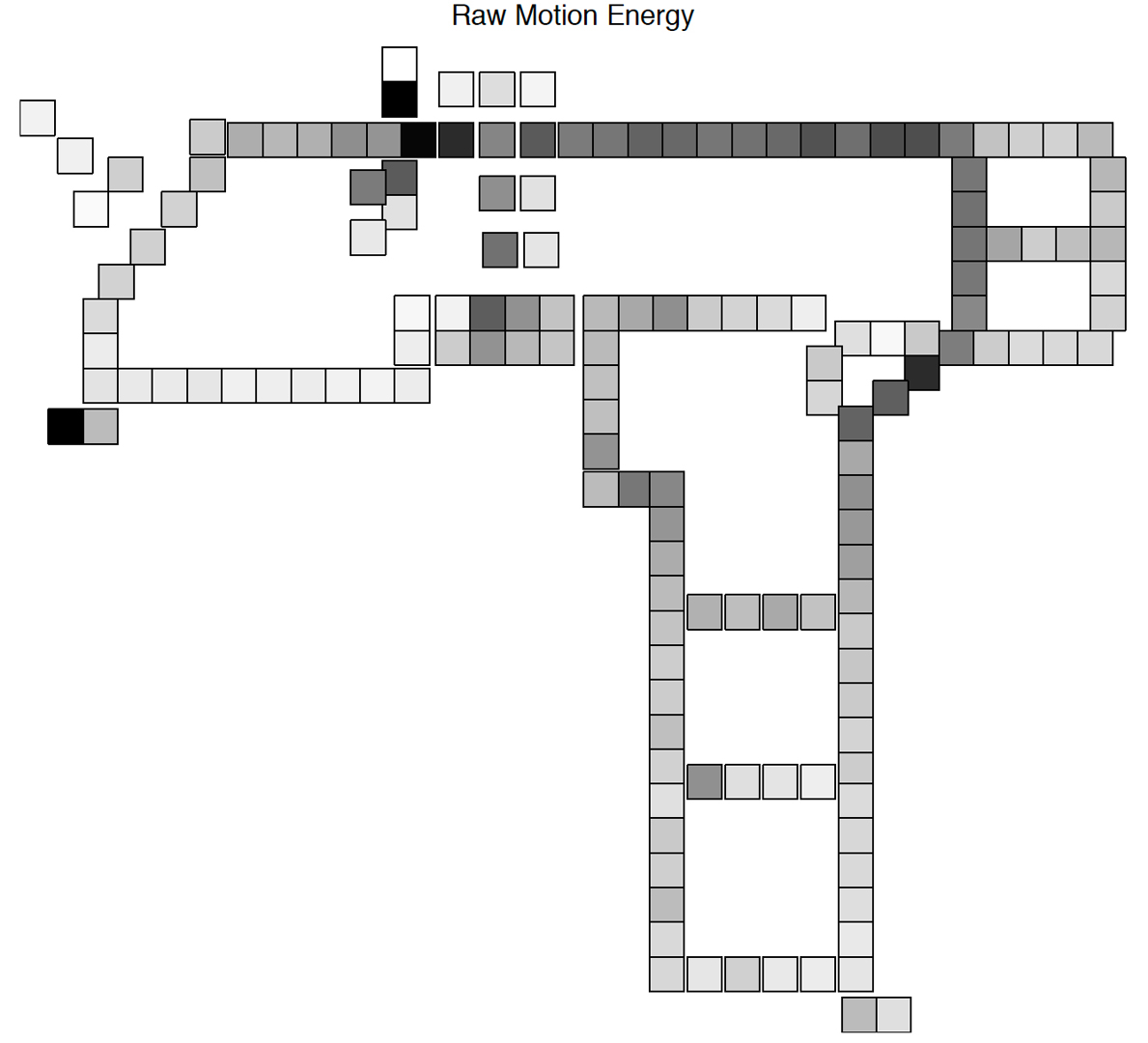
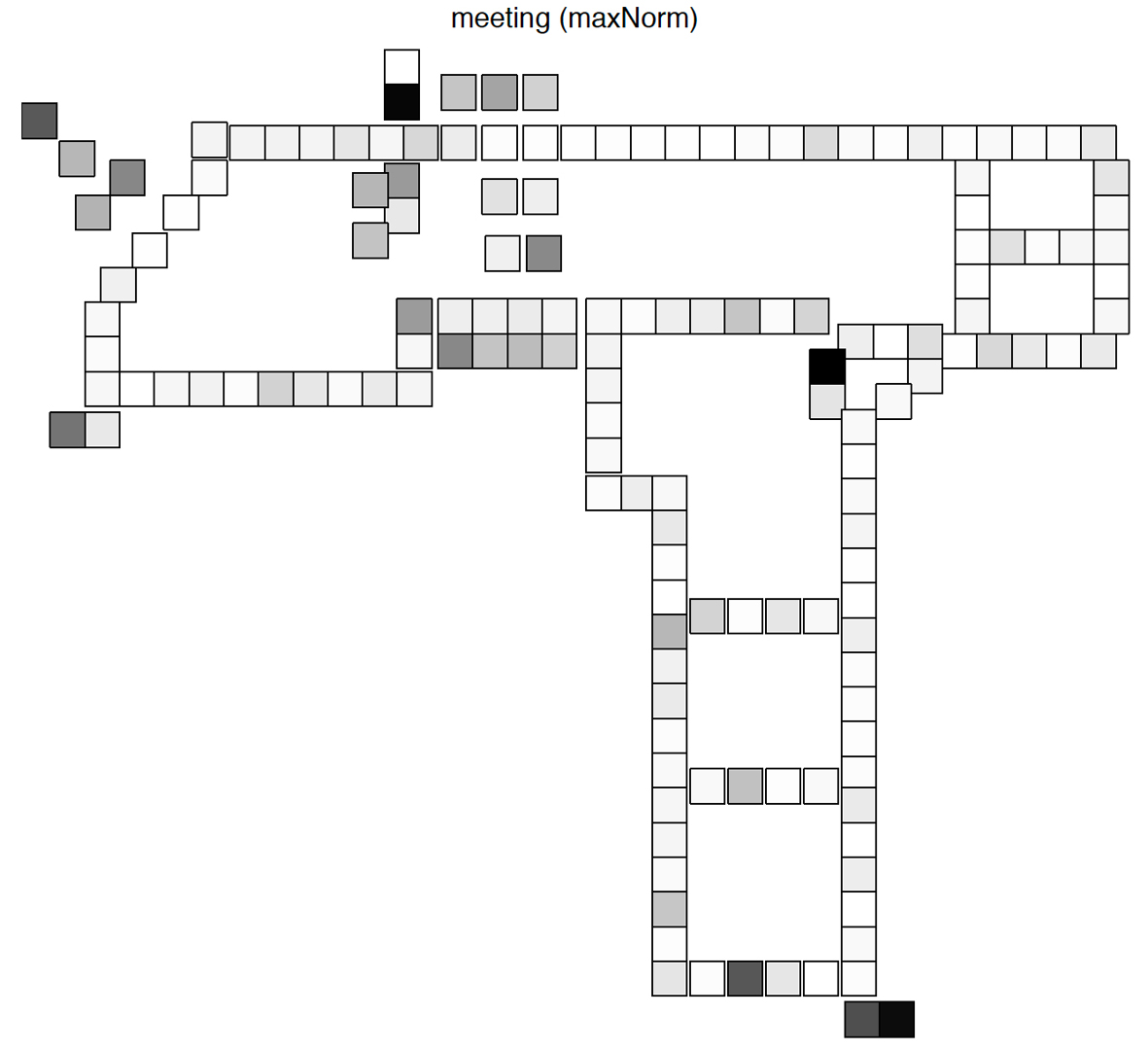
This exhibition explores the idea of using technology to understand the movement of people. Not just on a small stage, but in an expansive environment. Not the fine details of movement of individuals, but the gross patterns of a population. Not the identifying biometrics, but patterns of group behavior that evolve from the structure of the environment and the points of interest embedded in that structure. In this instance: a marketplace, and in particular, the marketplace of ideas called SIGGRAPH 2007 Emerging Technologies (ETECH).
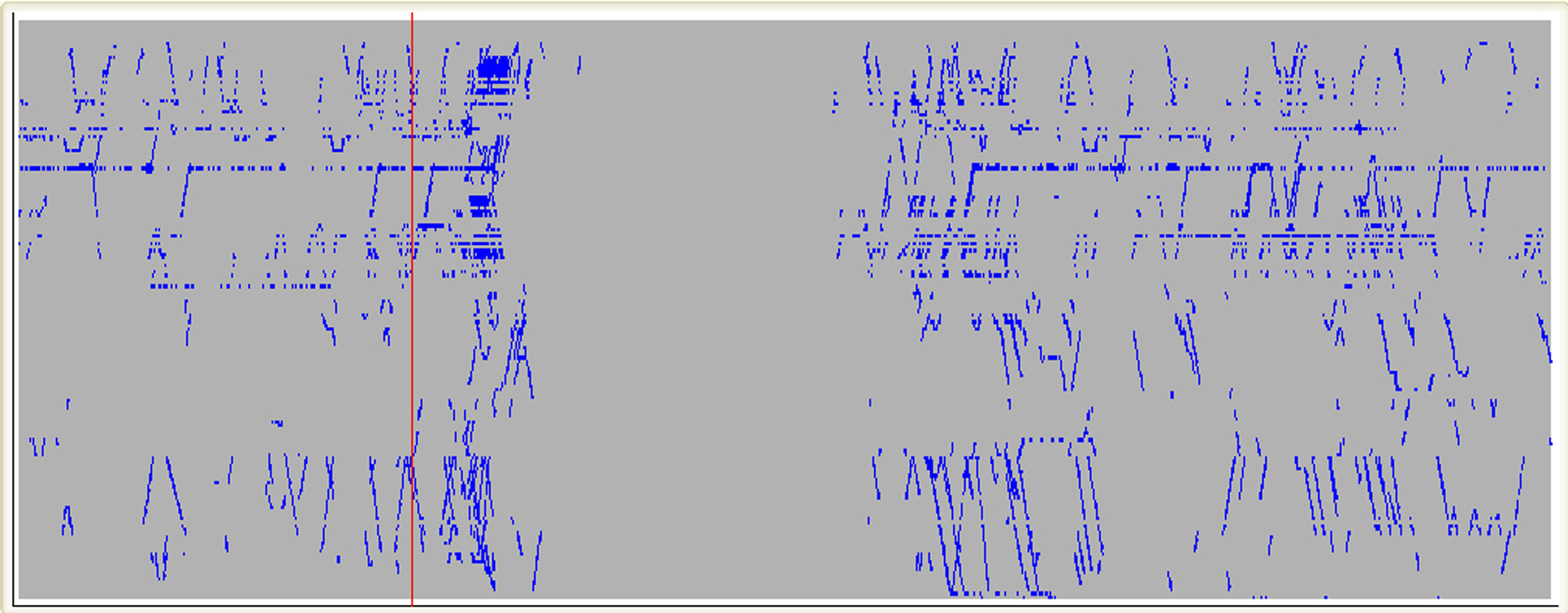
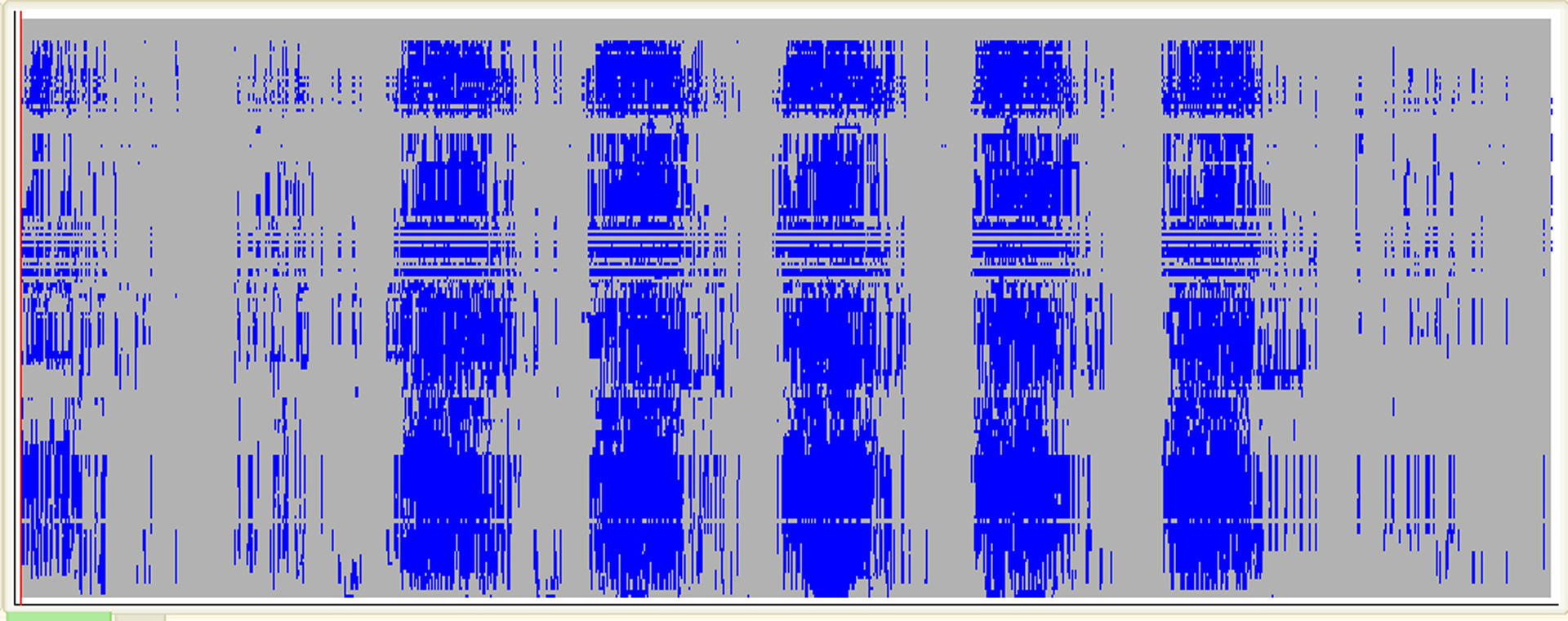
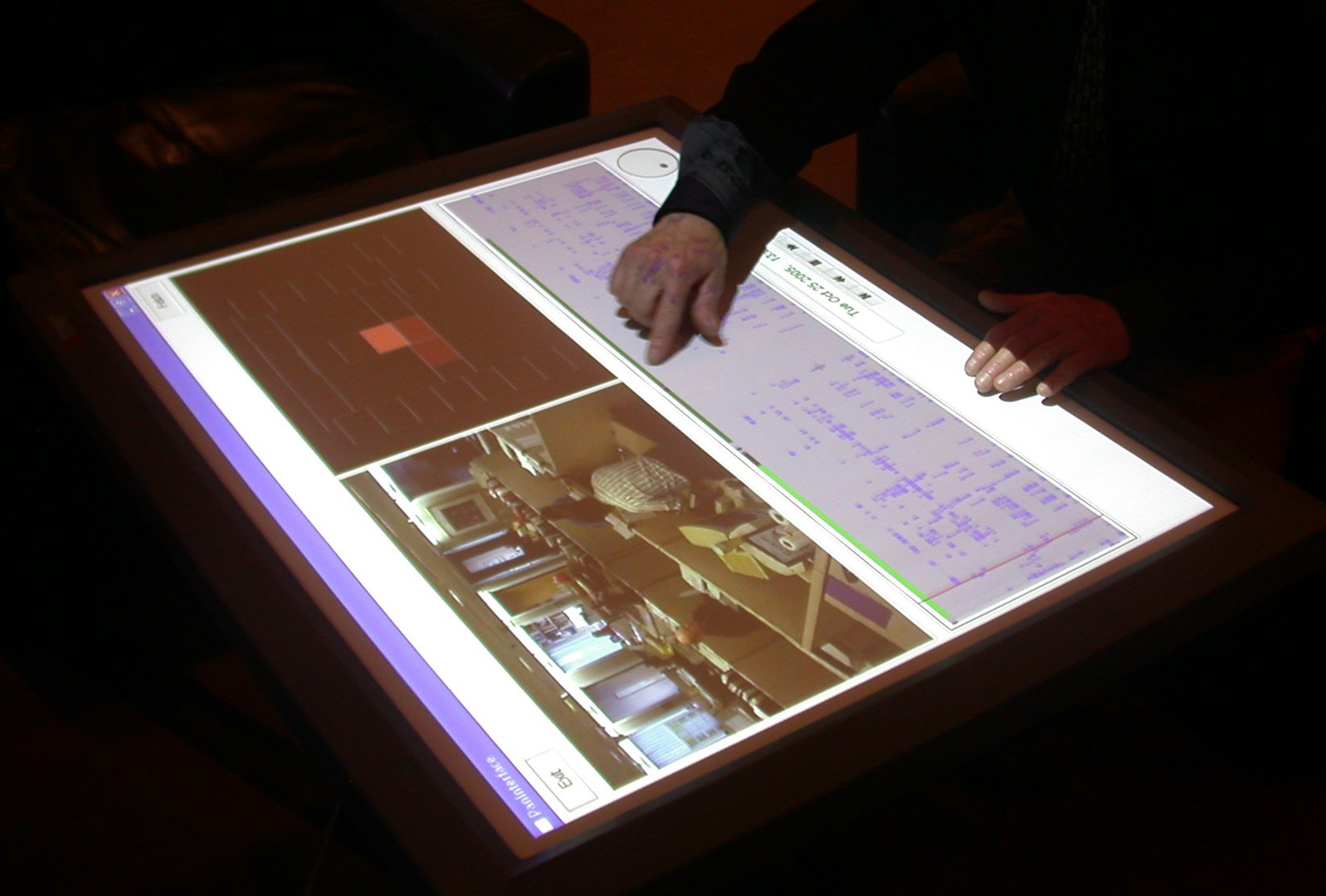
In this exhibit we combine sensor hardware, analytic tools, and visualization technology into a system to answer some of the most basic questions about a trade show venue like ETECH: where are the people right now? which exhibits always have a crowd? when is the venue most crowded? and how do other events such as keynotes affect venue traffic? We cannot say that we truly understand the value of the venue, if we cannot even answer these basic questions about how the participants utilize the space.
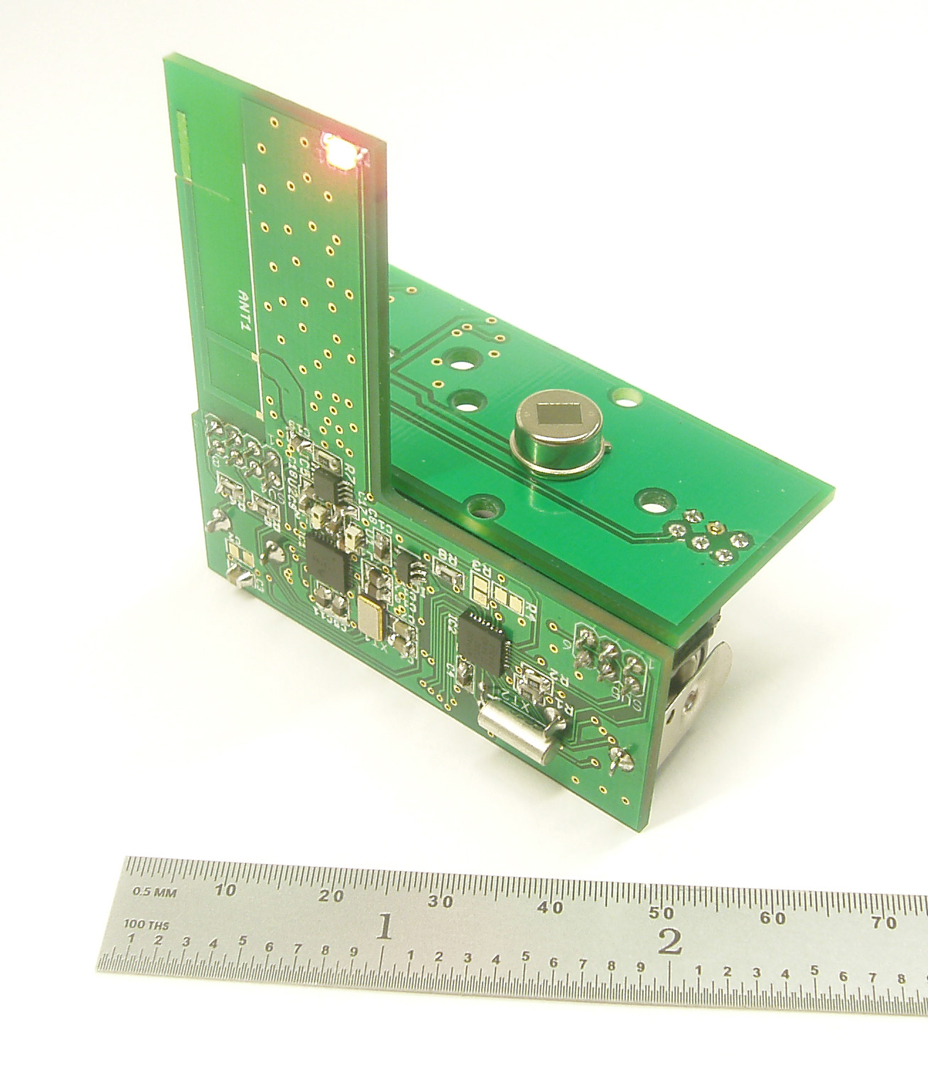
The first step in understanding a thing is observing it. At the Mitsubishi Electric Research Laboratories (MERL) we have developed a sensor network research platform specifically tuned to observing the activities of people in a built environment. A sensor node, with- out it?s enclosure, is pictured in Figure 1. The nodes are in some ways descended from the work at M.I.T/ [Munguia Tapia et al. 2006] but they include a number of improvements such as power efficient design for multi-year battery life, a standards-based MAC for communications reliability, and a design more suitable to large- scale manufacturing to support this kind of large-scale project.
This exhibit builds on the pioneering work in sensor networks in general such as Estrin [Estrin et al. 1999] and the Berkeley Motes
team [Hill et al. 2000]. We choose a dense network of simple sensors over a sparse collection of cameras [Rahimi et al. 2004] for the several reasons: cost, robustness, and privacy. The network is much more cost effective. Of course the sensors themselves are very inexpensive, but also the simplicity of the data stream generated by the sensor leads to lower computational overhead and lower communication overhead. Those both imply lower power consumption. The nodes pictured in Figure 1 draw an average of 200?W?. This means that the sensors can be wireless and run off battery or parasitic power sources. This means that installation can be extremely simple and fast, drastically lowering the overall cost of the system. Several groups have explored the benefits of networks of motion sensors for monitoring human behavior, primarily in residential settings [Aipperspach et al. 2006; Wilson and Atkeson 2005; Munguia Tapia et al. 2006; Abowd et al. 2002].
A network of simple sensors is more robust in the sense that single node failures do not have as significant an impact on the data stream as it would in the case of high-value nodes. Since the algorithms and hardware of each node are significantly simpler than what would be required in a smart camera, with integrated computer vision, possibly compression, and high-bandwidth communication, they can be engineered to a higher level of robustness to environ- mental, situational, and algorithmic failures.
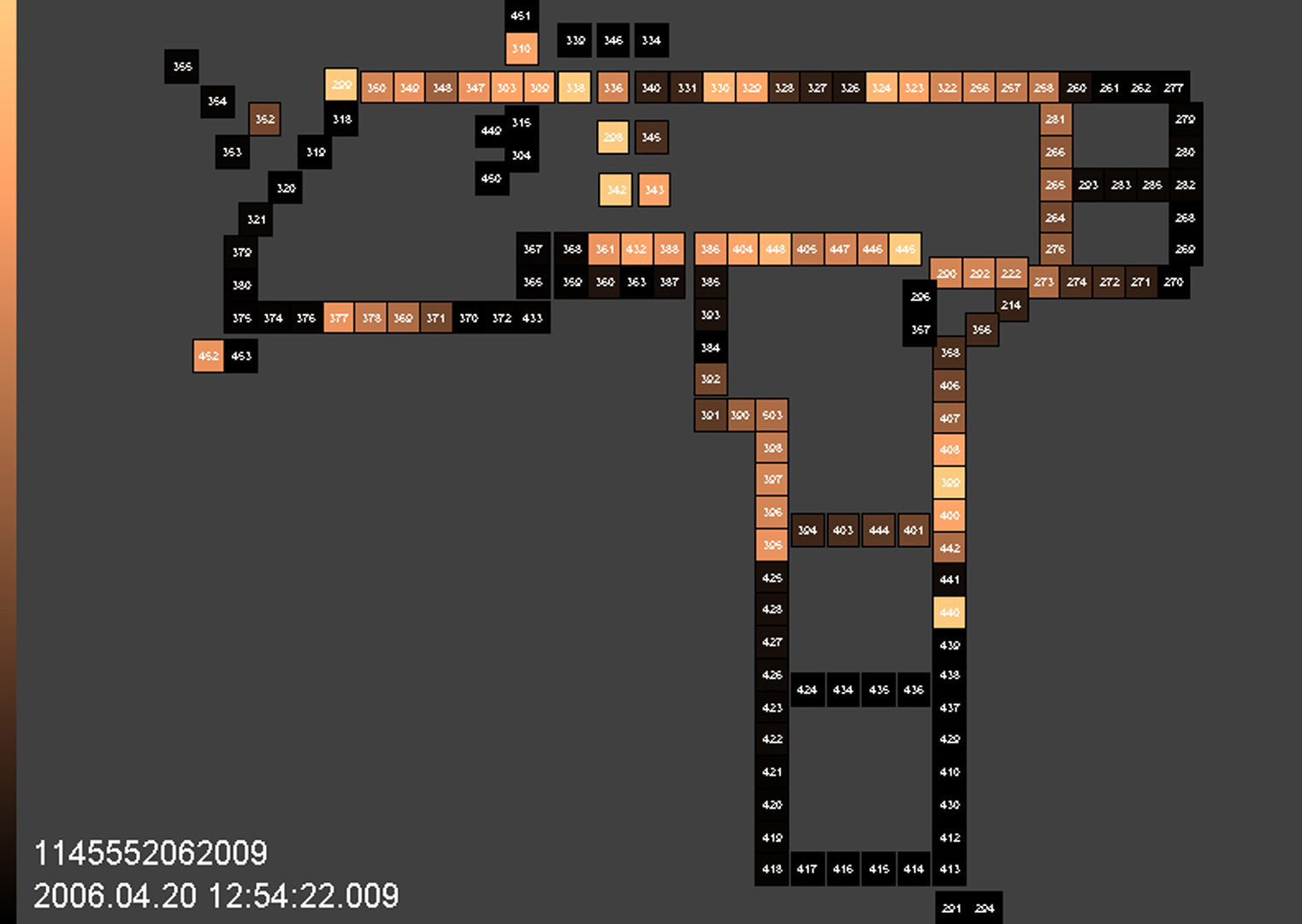
The sensor modality itself in inherently privacy-friendly in the sense that it records far less information than a camera: only about one bit per square meter per second. Not enough to identify individuals, certainly, or even enough to detect any but the most overt behaviors or moving about the environment With a camera-based system the system must be carefully constructed to scrub privacy- invading information from the collected data, and the observed can only trust that the system designers and operators have done that jobs. With motion sensors the information is never sensed, and so there is no need for the observed to trust the designer or operator at all[Reynolds and Wren 2006]
All that remains is to prove that the networks can be useful as well as affordable, robust, and sensitive to human needs.
Other Information:
References
ABOWD, G., BOBICK, A., ESSA, I., MYNATT, E., AND ROGERS, W. 2002. The aware home: Developing technologies for successful aging. In Proceedings of AAAI Workshop on Automation as a Care Giver.
AIPPERSPACH, R., COHEN, E., AND CANNY, J. 2006. Modeling human behavior from simple sensors in the home. In Proceedings Of The IEEE Conference On Pervasive Computing.
DIETZ, P. H., AND LEIGH, D. L. 2001. Diamondtouch: A multi- user touch technology. In Symposium on User Interface Software and Technology (UIST), ACM, 219–226. also MERL TR2003- 125.
ESTRIN, D., GOVINDAN, R., HEIDEMANN, J., AND KUMAR, S. 1999. Next century challenges: scalable coordination in sensor networks. In MobiCom ’99: Proceedings of the 5th annual ACM/IEEE international conference on Mobile computing and networking, ACM Press, New York, NY, USA, ACM, 263–270.
HILL, J., SZEWCZYK, R., WOO, A., HOLLAR, S., CULLER, D. E., AND PISTER, K. S. J. 2000. System architecture directions for networked sensors. In Architectural Support for Programming Languages and Operating Systems, 93–104.
HORTON, H. B., 1855. Machine for registering music. US Patent Office 13,946.
IVANOV, Y., AND WREN, C. 2006. Toward spatial queries for spatial surveillance tasks. In Pervasive: Workshop on Pervasive Technology Applied to Real-World Experiences with RFID and Sensor Networks, vol. EI123.
KAUR, I. 2007. OpenSpace: Enhancing Social Awareness at the Workplace. Master’s thesis, Massachusetts Institute of Technology. in submission.
MILLER, S. A. 2000. How to Get the Most Out of Trade Shows. McGraw-Hill Professional.
MUNGUIA TAPIA, E., INTILLE, S. S., LOPEZ, L., AND LARSON, K. 2006. The design of a portable kit of wireless sensors for naturalistic data collection. In Proceedings of PERVASIVE 2006, Springer-Verlag, Dublin, Ireland.
RAHIMI, A., DUNAGAN, B., AND DARRELL, T. 2004. Simultaneous calibration and tracking with a network of non-overlapping sensors. In Computer Vision and Pattern Recognition, IEEE Computer Society, 187–194.
REYNOLDS, C. J., AND WREN, C. R. 2006. Worse is better for ambient sensing. In Pervasive: Workshop on Privacy, Trust and Identity Issues for Ambient Intelligence.
WILSON, D. H., AND ATKESON, C. 2005. Simultaneous tracking & activity recognition (star) using many anonymous, binary sensors. In The Third International Conference on Pervasive Computing, 62–79.
Keyword(s):
- sensor networks
- visualization
- behavior
- marketing
-

- 2007 ETech Wren: BUZZ: Measuring and Visualizing Conference Crowds
-

- 2007 ETech Wren: BUZZ: Measuring and Visualizing Conference Crowds
-

- 2007 ETech Wren: BUZZ: Measuring and Visualizing Conference Crowds
Additional Images:
Acknowledgements:
This work is funded by the Mitsubishi Electric Corporation and is made possible by the foresight and wisdom of research directors at MERL, both past and present. We thank Ishwinder Kaur of the Massachusetts Institute of Technology for providing the throng data from the Media Laboratory Digital Life meeting. We are grateful to Dr. Joseph Marks, Prof. John Sibert, and Dr. Kathy Ryall for inviting us to participate in the Emerging Technologies venue this year.