“An Interface for Touching the Interface” by Nojima
Conference:
- SIGGRAPH 2001
-
More from SIGGRAPH 2001:


Type(s):
E-Tech Type(s):
- Haptics
- Interfaces & HCI
Entry Number: 12
Title:
- An Interface for Touching the Interface
Presenter(s):
Collaborator(s):
Description:
The word “haptization” means making it possible to touch. For example, haptic display devices allow users to touch computer-generated images. This process is often called haptization of information. Previous work on haptization is primarily focused on haptization of volume data produced by a CT scanner, a physical simulator, or a similar device. However, these systems haptize static or simulated information and are not effective in a real environment that changes dynamically.
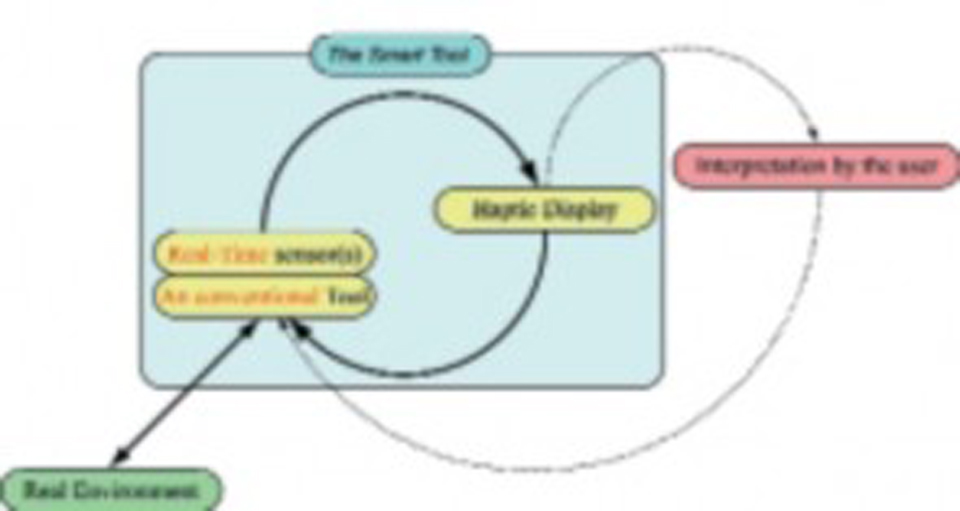
Smart-Tool is a new haptization technology that combines realtime sensing devices with a haptic display. The sensor receives stimuli that change dynamically in a real environment and displays the information to the user through haptic sensation. Therefore, Smart-Tool makes it possible to touch the dynamic information of real environments in real time.
Conventional tools and sensors typically display sensor information visually, requiring the user to constantly monitor the display, interpret information, and take action based on these interpretations, which can be very inaccurate, especially in stressful situations. Redundancy through audio can improve perception, but is still often insufficient because it still relies on the interpretation process. Smart-Tool can assist by sensing the real environment and displaying haptic information. This force is not only a display method that alleviates interpretation of tactile information, but also supports the action of the user.
A quintessential application of this system is surgery. Surgeons use many kinds of tools to incise body tissue, like scalpels, scissors, etc. If the surgeon uses a scalpel enhanced with Smart-Tool technology, the real-time sensor on the scalpel can sense what kind of tissue the edge of the scalpel is touching and inform the user through haptic sensation. When the scalpel is in the proximity of vital tissues such as arteries or a pulsing heart, the Smart-Tool protects them from damage by sensing them and generating a repulsive force that can be naturally interpreted by a surgeon as virtually hard.
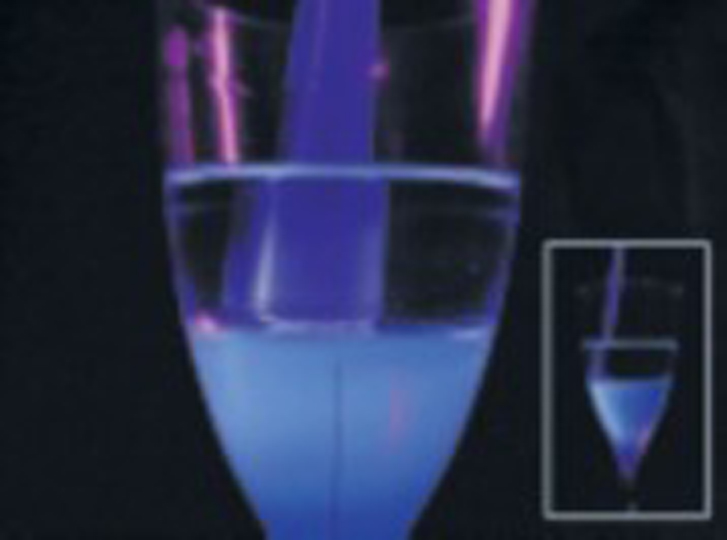
At SIGGRAPH 2001, the Smart-Tool system touches the interface between two liquids, which is usually impossible to feel. With Smart-Tool technology, the haptic sensation of the liquid interface is obtained from the tool’s sensor and transmitted to the user directly in real time, providing an intuitive way to both analyze and act upon the interface.
Additional Images: