“Waving Tentacles: A System and Method for Controlling a SMA Actuator” by Nakayasu

Conference:
Type(s):
Entry Number: 107
Title:
- Waving Tentacles: A System and Method for Controlling a SMA Actuator
Presenter(s)/Author(s):
Abstract:
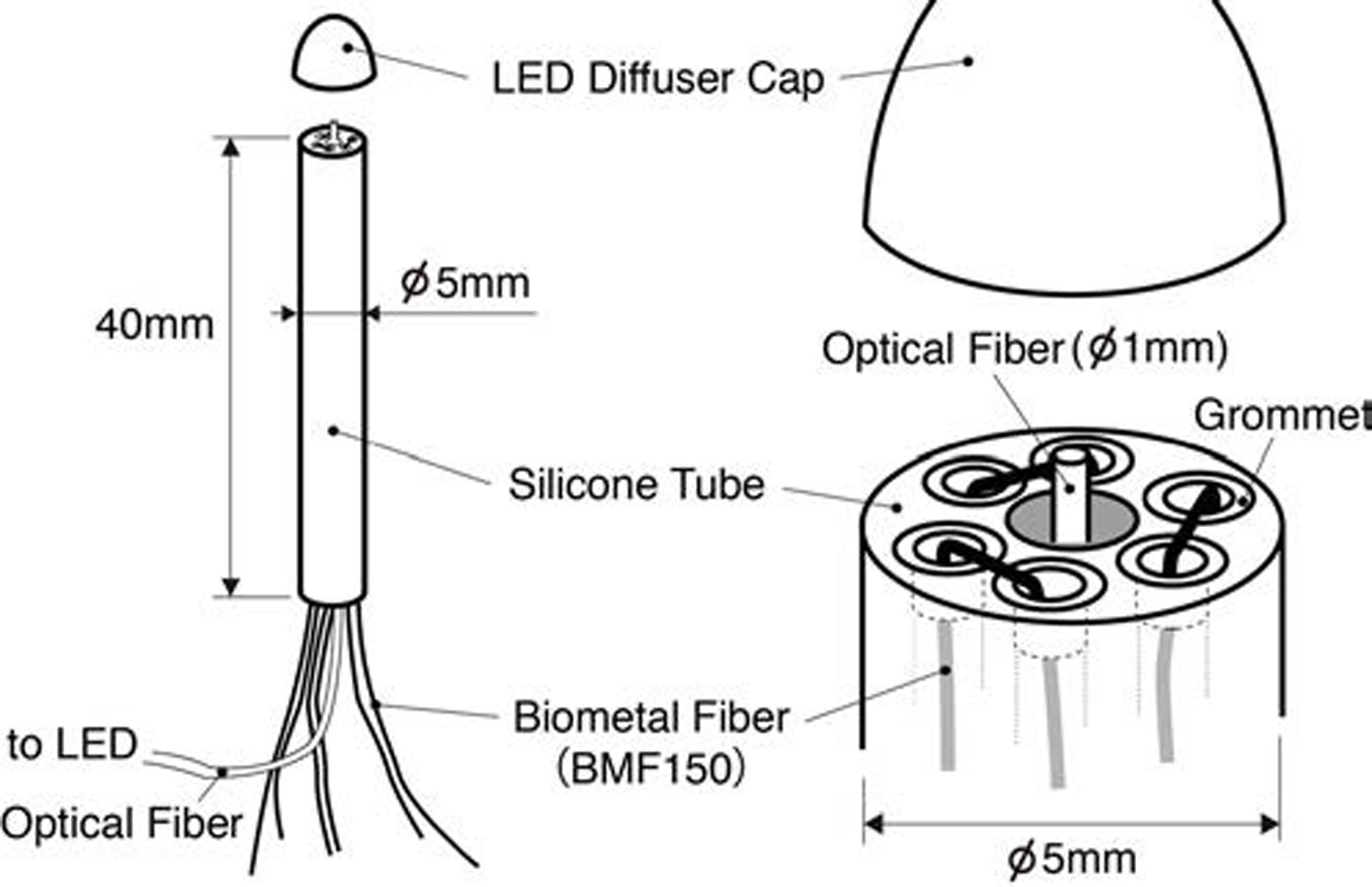
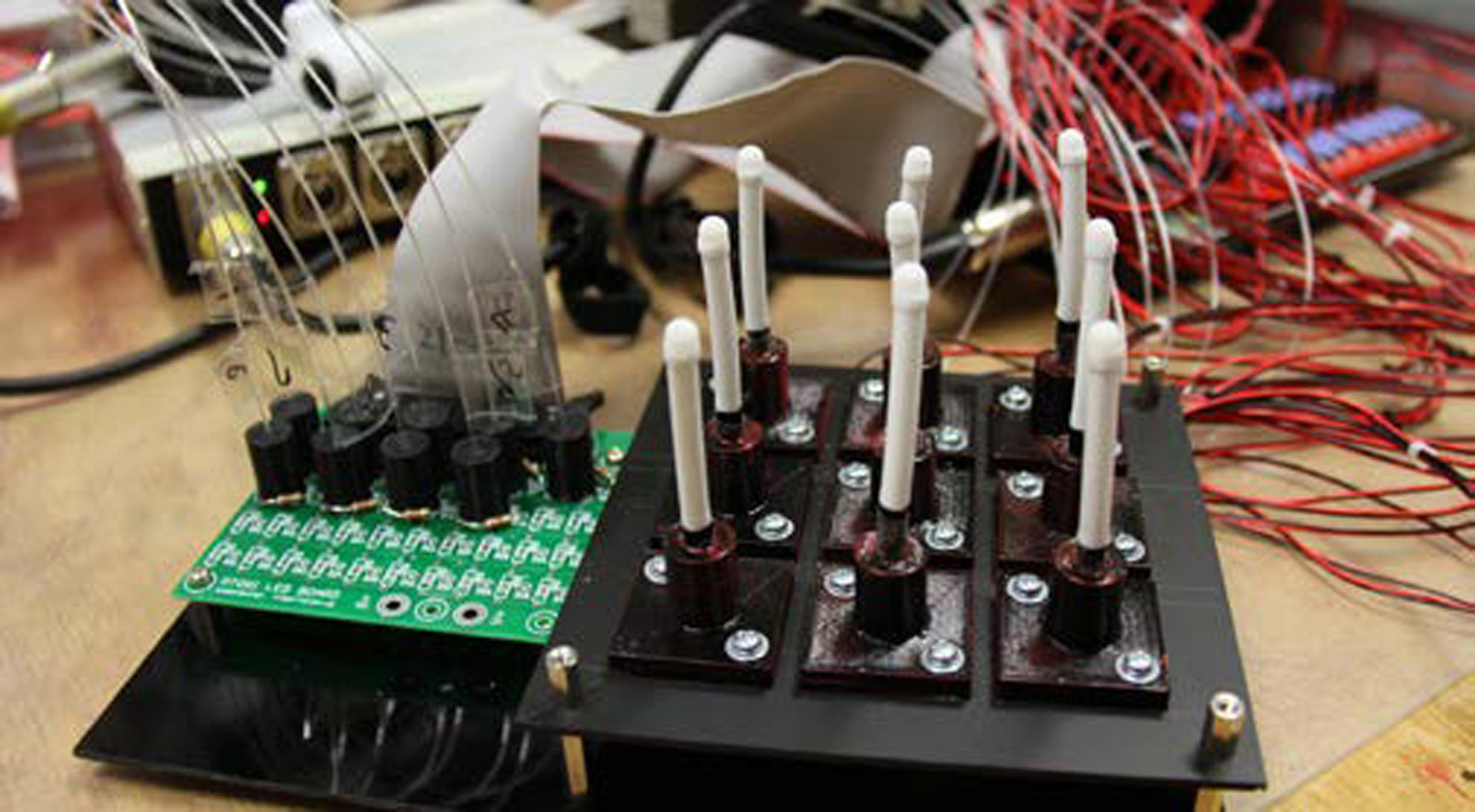
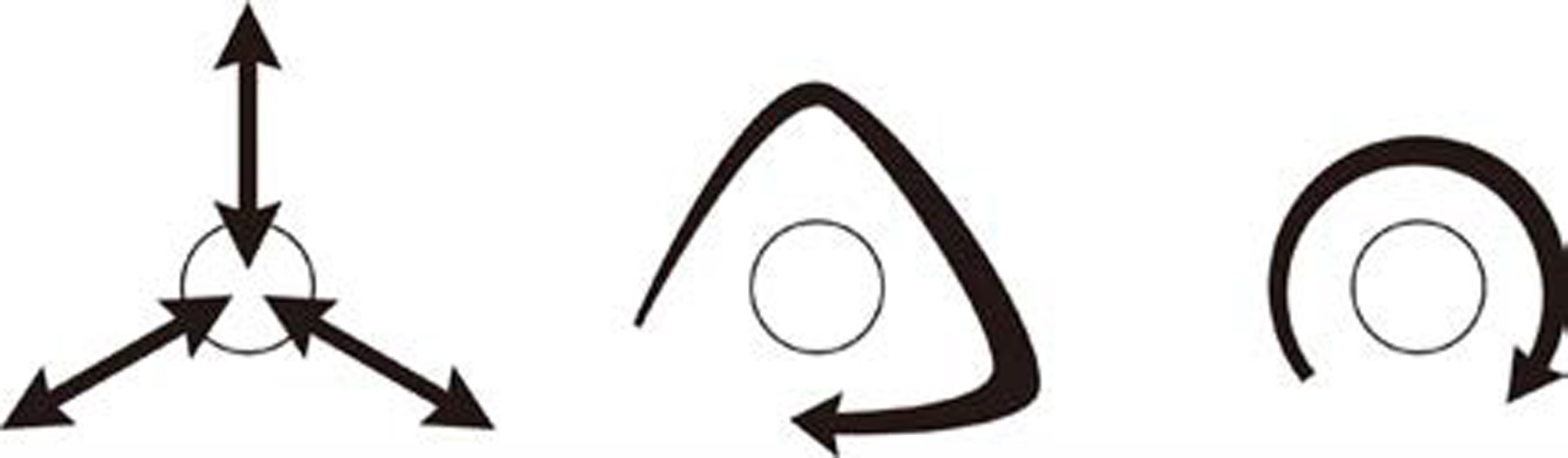
When we see the wriggling movement and the shape of a tentacle like the sea anemone under the sea, we feel an existence of a primitive life. The goal of this research is to realize the expression of a kinetic artwork like waving tentacles of sea anemones by robotics. Previously, we have created two pieces of art, “Himawari” [Nakayasu 2010] and “plant” [Nakayasu and Tomimatsu 2010], using a shape-memory alloy (SMA) actuator driven in one direction. In this paper, we introduce a new SMA actuator that can bend in three directions. At present, soft actuators bending in multi directions is developed in several areas. For example, there is a medical active catheter, a microrobot mimicking annelid animals and animatronics. However, these have a complex structure or are expensive. To realize the expression of waving tentacles needs a large number of actuators (e.g. over one thousand actuators). Therefore, we developed a budget actuator with a simple structure.
References:
- Nakayasu, A. 2010. Himawari: Shape Memory Alloy Motion Display for Robotic Representation. In SIGCHI 2010 Extended Abstracts, ACM, 4327–4332.
- Nakayasu, A., and Tomimatsu, K. 2010. SMA motion display: plant. In SIGGRAPH 2010 Posters, ACM.
Additional Images: