
“Tangible interaction + graphical interpretation: a new approach to 3D modeling” by Anderson, Frankel, Marks, Agarwala, Beardsley, et al. …
Conference:
Type(s):
Title:
- Tangible interaction + graphical interpretation: a new approach to 3D modeling
Presenter(s)/Author(s):
Abstract:
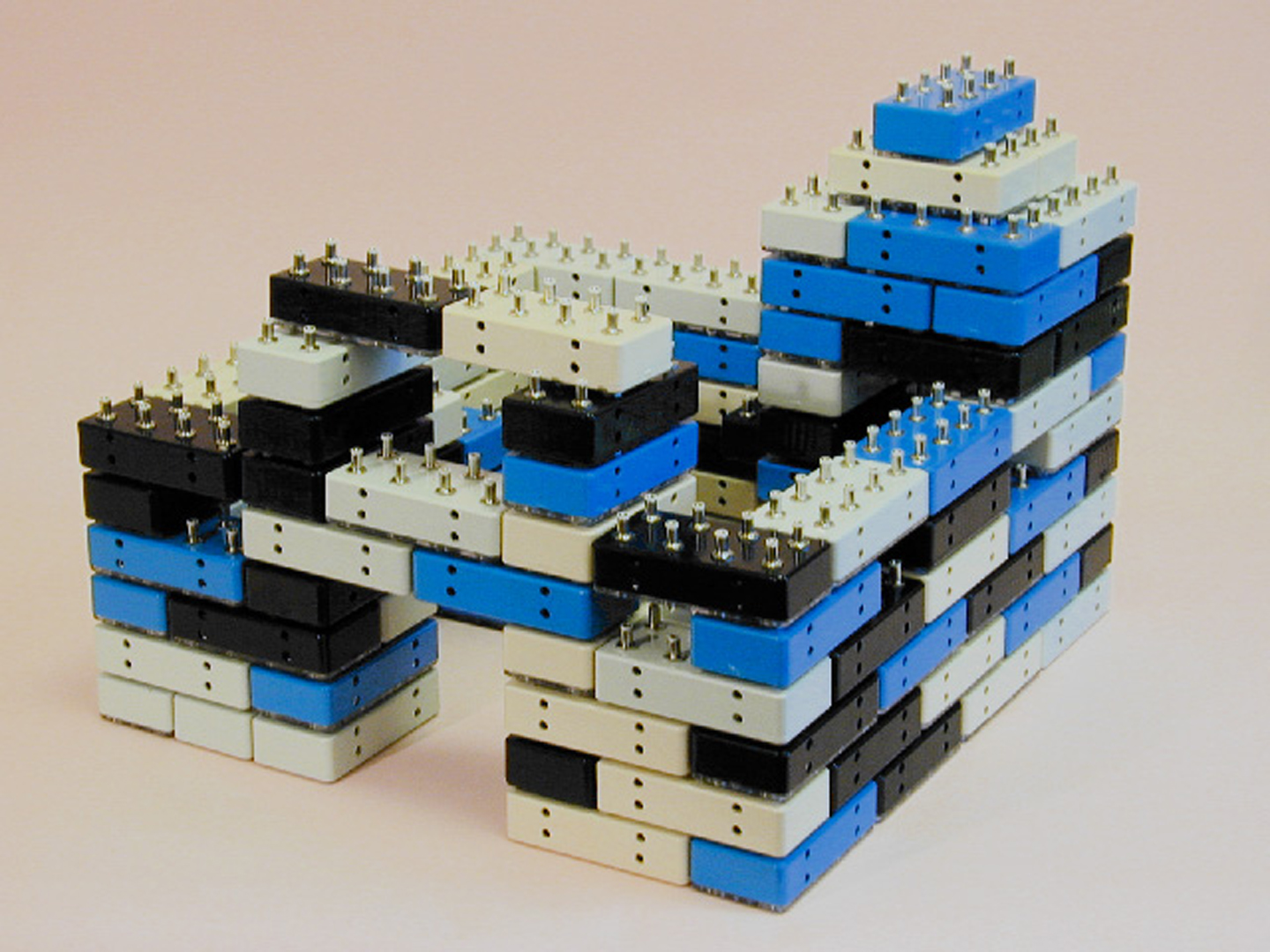
Construction toys are a superb medium for geometric models. We argue that such toys, suitably instrumented or sensed, could be the inspiration for a new generation of easy-to-use, tangible modeling systems—especially if the tangible modeling is combined with graphical-interpretation techniques for enhancing nascent models automatically. The three key technologies needed to realize this idea are embedded computation, vision-based acquisition, and graphical interpretation. We sample these technologies in the context of two novel modeling systems: physical building blocks that self-describe, interpret, and decorate the structures into which they are assembled; and a system for scanning, interpreting, and animating clay figures.
References:
1. R. Aish. 3D input for CAAD systems. Computer-Aided Design, 11(2):66-70, Mar. 1979.]]
2. R. Aish and P. Noakes. Architecture without numbers – CAAD based on a 3D modelling system. Computer-Aided Design, 16(6):321-328, Nov. 1984.]]
3. G. Anagnostou, D. Dewey, and A. Patera. Geometry-defining processors for engineering design and analysis. The Visual Computer, 5:304-315, 1989.]]
4. B. G. Baumgart. Geometric modeling for computer vision. Technical Report AIM-249, AI Laboratory, Stanford Univ., Oct. 1974.]]
5. R. Brooks. Model-based 3D interpretations of 2D images. IEEE Trans. on Pattern Analysis and Machine Intelligence, 5(2):140-150, 1983.]]
6. G. Cybenko, A. Bhasin, and K. D. Cohen. Pattern recognition of 3D CAD objects: Towards an electronic Yellow Pages of mechanical parts. Smart Engineering Systems Design, 1:1- 13, 1997.]]
7. D. Dewey and A. Patera. Geometry-defining processors for partial differential equations. In B. Alder, editor, Special Purpose Computers, pages 67-96. Academic Press, 1988.]]
8. S. Dickinson, A. Pentland, and A. Rosenfeld. From volumes to views: An approach to 3D object recognition. Computer Vision, Graphics, and Image Processing: Image Understanding, 55(2):130-154, 1992.]]
9. S. J. Dickinson and D. Metaxas. Integrating qualitative and quantitative shape recovery. Intl. Journal of Computer Vision, 13(3):311-330, 1994.]]
10. C. Esposito, W. B. Paley, and J. Ong. Of mice and monkeys: A specialized input device for virtual body animation. In Proc. of Symposium on Interactive 3D Graphics, pages 109-114, 213, Monterey, California, Apr. 1995.]]
11. A. W. Fitzgibbon, G. Cross, and A. Zisserman. Automatic 3D model construction for turn-table sequences. In Proc. of SMILE Workshop, Freiburg, Germany, June 1998.]]
12. J. Frazer. Use of simplified three-dimensional computer input devices to encourage public participation in design. In Proc. of Computer Aided Design 82, pages 143-151. Butterworth Scientific, 1982.]]
13. J. Frazer. An Evolutionary Architecture. Architectural Association, London, 1994. Describes several tangible modelers developed by Frazer’s group from 1979 onwards.]]
14. J. Frazer, P. Coates, and J. Frazer. Software and hardware approaches to improving the man-machine interface. In Proc. of the First International IFIP Conf. on Computer Applications in Production and Engineering, pages 1083-94, Amsterdam, Holland, 1983. North Holland.]]
15. J. Frazer, J. Frazer, and P. Frazer. Intelligent physical threedimensional modelling system. In Proc. of Computer Graphics 80, pages 359-370. Online Publications, 1980.]]
16. J. Frazer, J. Frazer, and P. Frazer. New developments in intelligent modelling. In Proc. of Computer Graphics 81, pages 139-154. Online Publications, 1981.]]
17. N. Gagvani, D. Kenchammana-HoseKote, and D. Silver. Volume animation using the skeleton tree. In Proc. of the IEEE Symposium on Volume Visualization, pages 47-53, Research Triangle Park, NC, Oct. 1998.]]
18. M. G. Gorbet and M. Orth. Triangles: Design of a physical/digital construction kit. In Proc. of DIS 97, pages 125- 128, Amsterdam, Holland, Mar. 1997. ACM.]]
19. M.G. Gorbet, M. Orth, and H. Ishii. Triangles: Tangible interface for manipulation and exploration of digital information topography. In Proc. of CHI 98, pages 49-56, Los Angeles, California, Apr. 1998. ACM.]]
20. J. K. Hodgins and N. S. Pollard. Adapting simulated behaviors for new characters. In Proc. of SIGGRAPH 97, pages 153-162, Los Angeles, California, Aug. 1997.]]
21. T. Igarashi, S. Matsuoka, and H. Tanaka. Teddy: A sketching interface for 3D freeform design. In Proc. of SIGGRAPH 99, pages 409-416, Los Angeles, California, Aug. 1999.]]
22. S. B. Kang. Quasi-euclidean recovery from unknown but complete orbital motion. Technical Report TR 97-10, Compaq CRL, 1997.]]
23. F. Martin and R. Borovoy. The active LEGO baseplate project, http : / / fredm, www. media .mit. – edu/people/fredm/projects/ab/, 1994.]]
24. Ovid. Metamorphoses:X. Rome, 1 AD.]]
25. R. Pausch, T. Burnette, D. Brockway, and M. E. Weiblen. Navigation and locomotion in virtual worlds via flight into hand-held miniatures. In Proc. of SIGGRAPH 95, pages 399- 400, Los Angeles, California, Aug. 1995.]]
26. W. H. Press, B. P. Flannery, S. A. Teukolsky, and W. T. Vetterling. Numerical Recipes in C. Cambridge University Press, 1988.]]
27. M. H. Raibert. Legged Robots That Balance. MIT Press, Cambridge, 1986.]]
28. J. C. Russ. The Image Processing Handbook. CRC Press, 1998.]]
29. S.M. Seitz and C. R. Dyer. Photorealistic scene reconstruction by voxel coloring. International Journal of Computer Vision, 35(2):151-173, 1999.]]
30. F. Solina and R. Bajcsy. Recovery of parametric models from range images: The case for superquadrics with global deformations. IEEE Trans. on Pattern Analysis and Machine Intelligence, 12(2):131-146, 1990.]]
31. H. Suzuki and H. Kato. AlgoBlock: A tangible programming language — a tool for collaborative learning. In Proc. of the 4th European Logo Conference, pages 297-303, 1993.]]
32. D. Terzopoulos and K. Fleischer. Deformable models. The Visual Computer, 4(6):306-331, December 1988.]]
33. P. H. Winston. Learning structural descriptions from examples. In P. H. Winston, editor, The Psychology of Computer Vision. McGraw-Hill, New York, 1975.]]
34. R. C. Zeleznik, K. Herndon, and J. F. Hughes. SKETCH: An interface for sketching 3D scenes. In Proc. of SIGGRAPH 96, pages 163-170, New Orleans, Louisiana, Aug. 1996.]]