
“Robot gaming and learning using augmented reality” by Kostandov, Schwertfeger, Jenkins, Jianu, Buller, et al. …

Conference:
Type(s):
Title:
- Robot gaming and learning using augmented reality
Presenter(s)/Author(s):
Abstract:
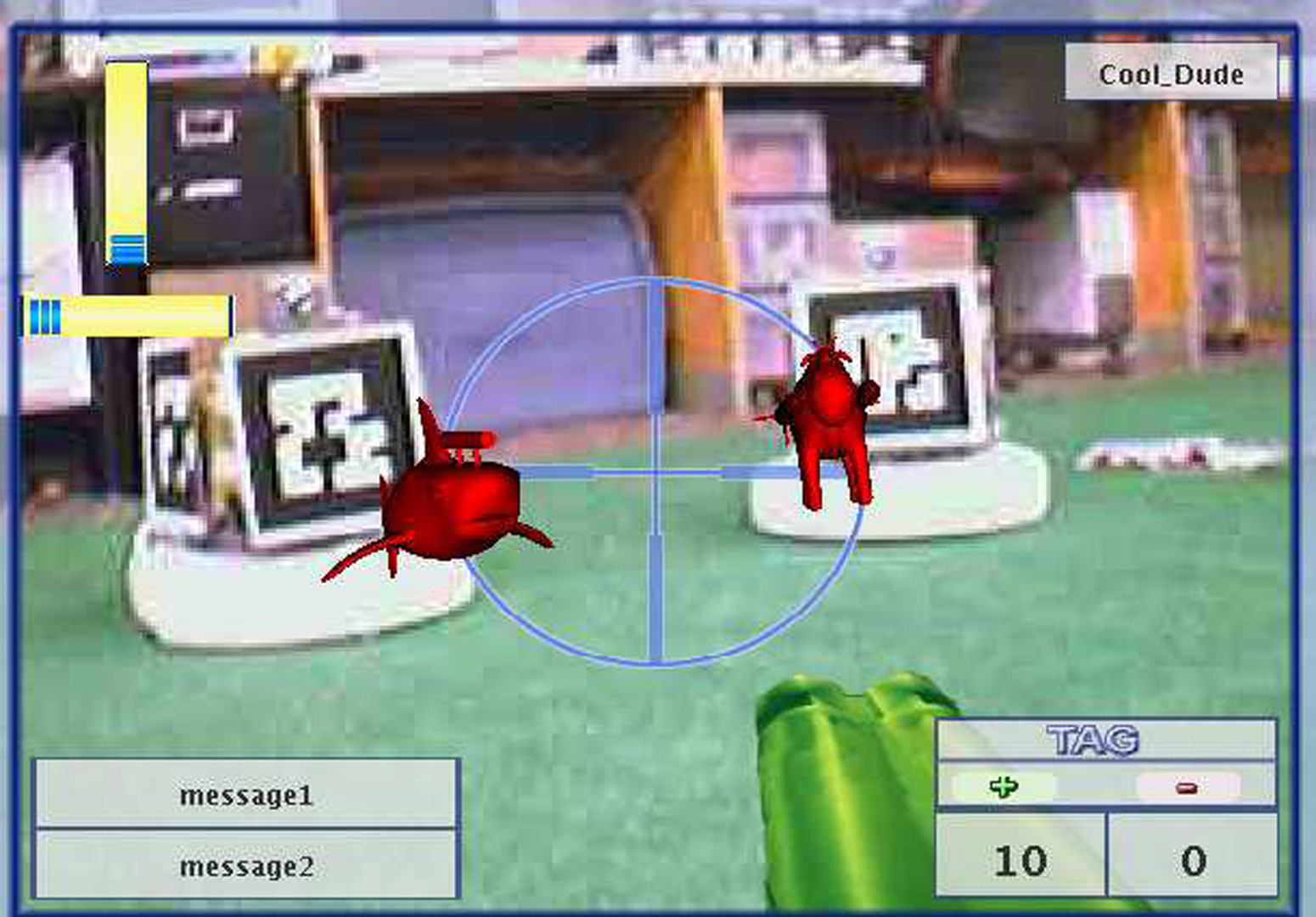
Towards accessible teaching of robots from demonstration, we describe a prototype mixed-reality distributed multi-player robotic gaming environment. Our goal is to provide robot learning researchers with a means to collect large corpora of data representative of human decision making. Robot control by a human operator (or teleoperation) is cast in a video game style interface to leverage the ubiquity and popularity of games while minimizing tedium commonly associated with robot training.
References:
1. Collett, T. H., MacDonald, B. A., and Gerkey, B. P. 2005. Player 2.0: Toward a practical robot programming framework. In Proc. ACRA’05.
2. Fiala, M. 2005. Artag, a fiducial marker system using digital techniques. In Proc. CVPR’05, vol. 1, 590–596.
3. Young, J., Xin, M., and Sharlin, E. 2007. Robot expressionism through cartooning. ACM SIGCHI/SIGART Human-Robot Interaction, 309–316.