
“Realistic animation of rigid bodies” by Hahn
Conference:
Type(s):
Title:
- Realistic animation of rigid bodies
Presenter(s)/Author(s):
Abstract:
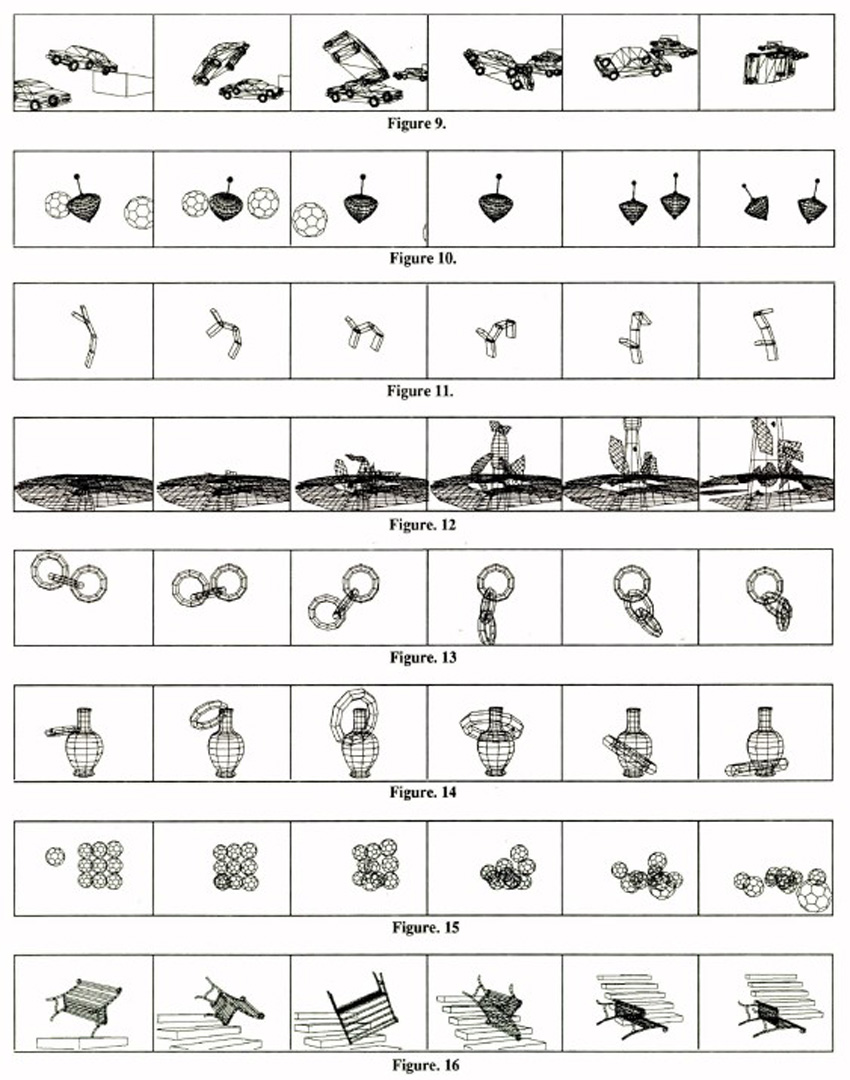
The theoretical background and implementation for a computer animation system to model a general class of three dimensional dynamic processes for arbitrary rigid bodies is presented. The simulation of the dynamic interaction among rigid bodies takes into account various physical characteristics such as elasticity, friction, mass, and moment of inertia to produce rolling and sliding contacts. If a set of bodies is statically unstable, the system dynamically drives it toward a stable configuration while obeying the geometric constraints of the system including general non-holonomic constraints. The system also provides a physical environment with which objects animated using more traditional techniques can interact. The degree of interaction is easily controlled by the animator. A computationally efficient method to merge kinematics and dynamics for articulated rigid bodies to produce realistic motion is presented.
References:
1. Armstrong, William W. and Green, Mark W. “The Dynamics of Articulated Rigid Bodies for Purposes of Animation”. Proc. Graphics lnterfafe 85 (1985), pp. 407-415.
2. Barzel, Ronen and Barr, Alan H. “Modeling With Dynamic Constraints”. ACM SIGGRAPH “87 Course Notes (1987).
3. Boyse, John W. “Interference Detection Among Solids and Surfaces”. Communications of the ACM 22, (January 1979), pp. 3-9.
4. Flash, Tamar and Hogan, Neville. “The Coordination of Arm Movements An Experimentally Confirmed Mathematical Model”. MIT AJ. Memo 786 (November 1984).
5. Girard, Michael and Maciejewski, A. A. “Computational Modeling for the Computer Animation of Legged Figures”. Computer Graphics 19, 3 (July 1985), pp. 263-270.
6. Goldsmith, Wemer. Impact: The Theory and Physical Behavior of Colliding Solids. Edward Arnold Pub. Ltd., London, 1960.
7. Goldstein, Herbert. Classical Mechanics. Addison- Wesley Publishing Company, Reading, MA, 1950.
8. Hahn, James. “Rigid Body Dynamics Simulations”. ACM SIGGRAPH “87 Film and Video Show (1987).
9. Haumann, David. “Modeling the Physical Behavior of Flexible Objects”. ACM SIGGRAPH” 87 Course Notes (1987).
10. Hombeck, Robert W. Numerical Methods. Quantum Publishers, Inc., New York, NY, 1975.
11. Hughes, Peter C. Spacecraft Attitude Dynamics. John Wiley & Sons, Inc., 1986.
12. Isaacs, Paul M. and Cohen, Michael F. “Controlling Dynamic Simulation With Kinematic Constraints, Behavior Functions and Inverse Dynamics”. Computer Graphics 21, 4 (July 1987), pp. 215-224.
13. Kane, Thomas and Levinson, David. Dynamics: Theory and Applications. McGraw-Hill, New York, N.Y., 1985.
14. Press, William H. Numerical Recipes. Cambridge University Press, 1986.
15. Routh, E. J. Dynamics of a System of Rigid Bodies. Macmillan and Company, Ltd., London, 1905.
16. Symon, Keith R. Mechanics. Addison-Wesley Publishing Company, Reading, MA, 1971.
17. Terzopoulos, Demetri, Platt, John, Barr, Alan, and Fleischer, Kurt. “Elastically Deformable Models”. Computer Graphics 21, 4 (July 1987), pp. 205-214.
18. Weil, J. “The Synthesis of Cloth Objects”. Computer Graphics 20, 4 (August 1986), pp. 49-54.
19. Wilhelms, J. and Barsky, B.A. “Using Dynamic Analysis for the Animation of Articulated Bodies Such as Humans and Robots”. Proc. Graphics Interface 85 (May 1985), pp. 97-104.
20. Witkin, Andrew, Fleischer, Kurt, and Barr, Alan. “Energy Constraints On Pararneterized Models”. Computer Graphics 21, 4 (July 1987), pp. 225-229.