
“Real-time stereo vision using semi-global matching on programmable graphics hardware” by Rosenberg, Davidson, Muller and Han
Conference:
Type(s):
Title:
- Real-time stereo vision using semi-global matching on programmable graphics hardware
Session/Category Title: Camera, Lights, Action!
Presenter(s)/Author(s):
Abstract:
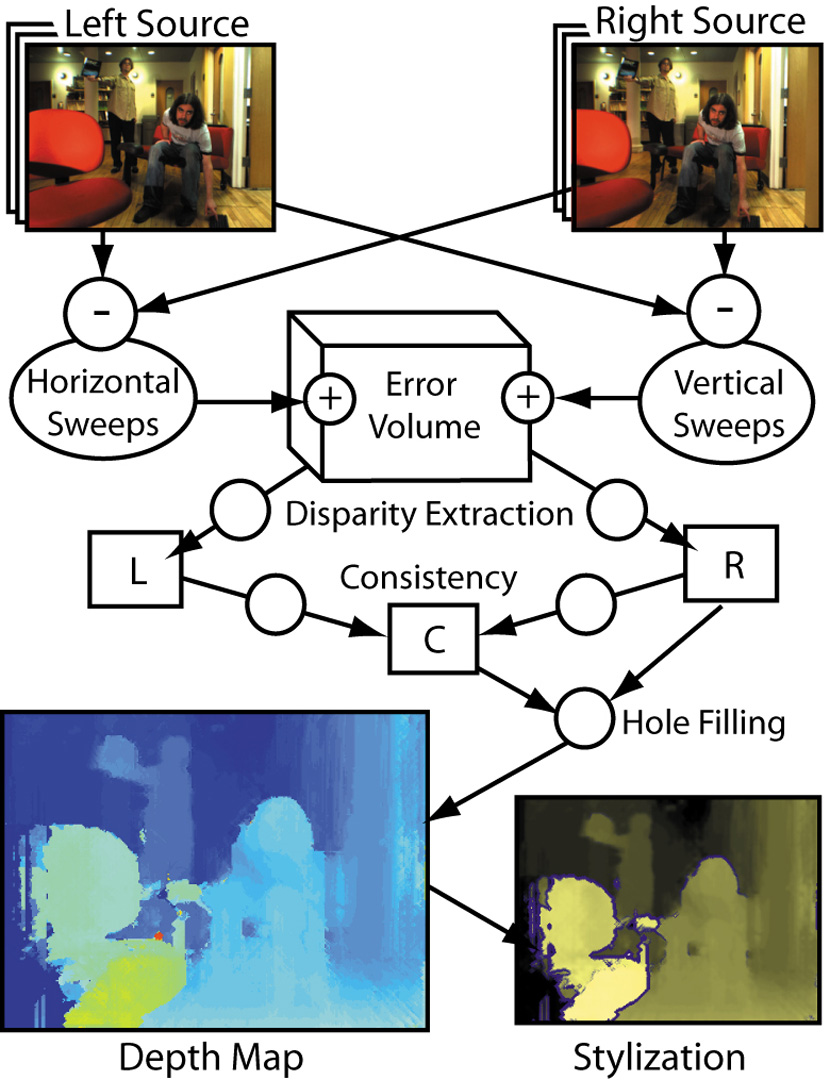
Extracting depth information from pairs of stereo images in real-time allows interactive 3d operations on live video streams. We present a novel adaptation of the Semi-Global Matching (SGM) Algorithm [Hirschmüller 2005] to graphics processing (GPU) hardware, which operates in real-time and frees the CPU for other tasks. We also present shaders which use the extracted depth information to manipulate the video stream in real time.
References:
1. Hirschmüller, H. 2005. Accurate and Efficient Stereo Processing by Semi-Global Matching and Mutual Information. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, vol. 2, 807–814.
2. Scharstein, D. and Szeliski, R. 2002. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. In International Journal of Computer Vision 47, 1–3 (Apr. 2002), 7–42.