
“Real-time shape recovery from silhouette and disparity” by Kim, Min, Choi, Kim and Sohn
Conference:
Type(s):
Title:
- Real-time shape recovery from silhouette and disparity
Presenter(s)/Author(s):
Abstract:
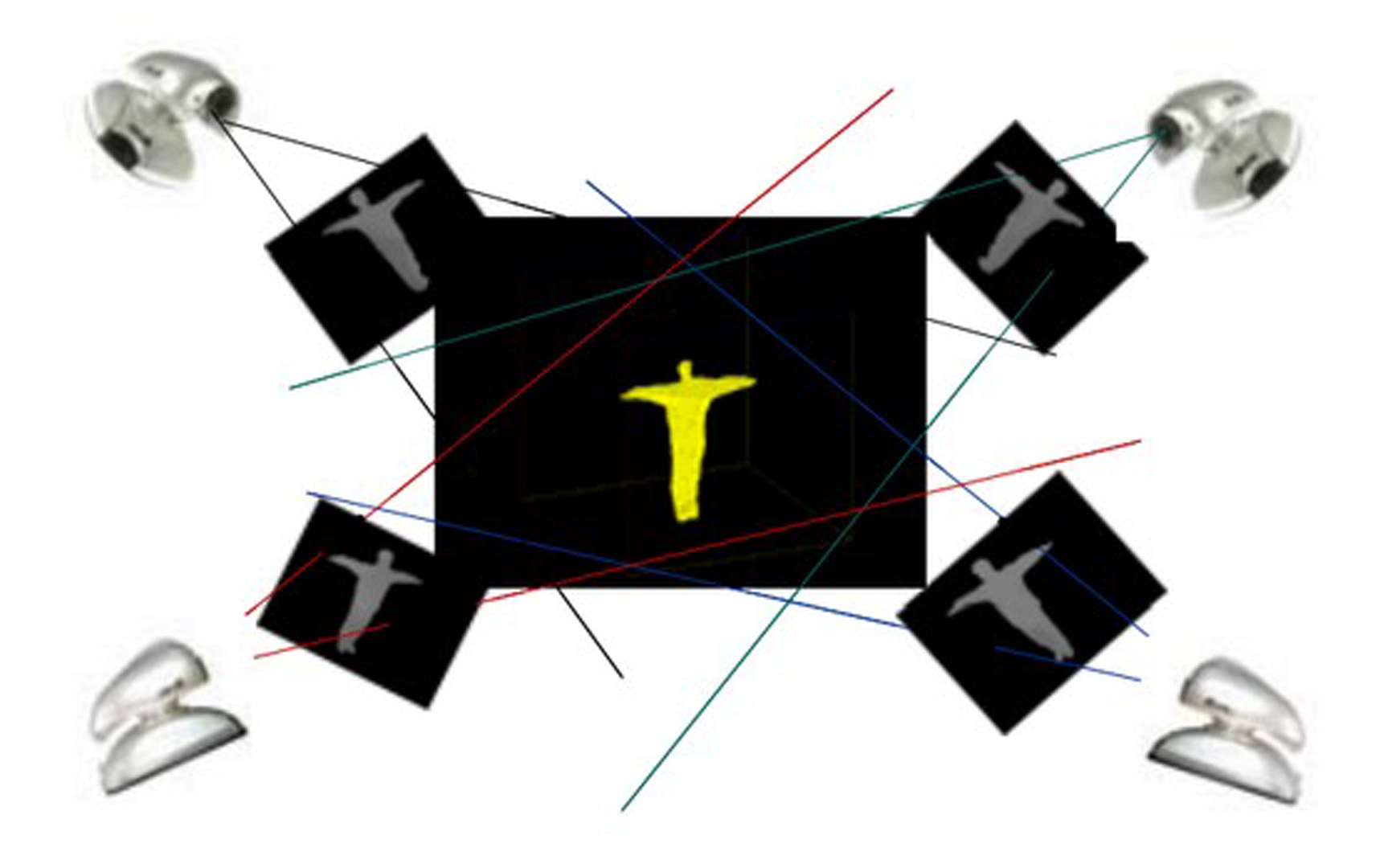
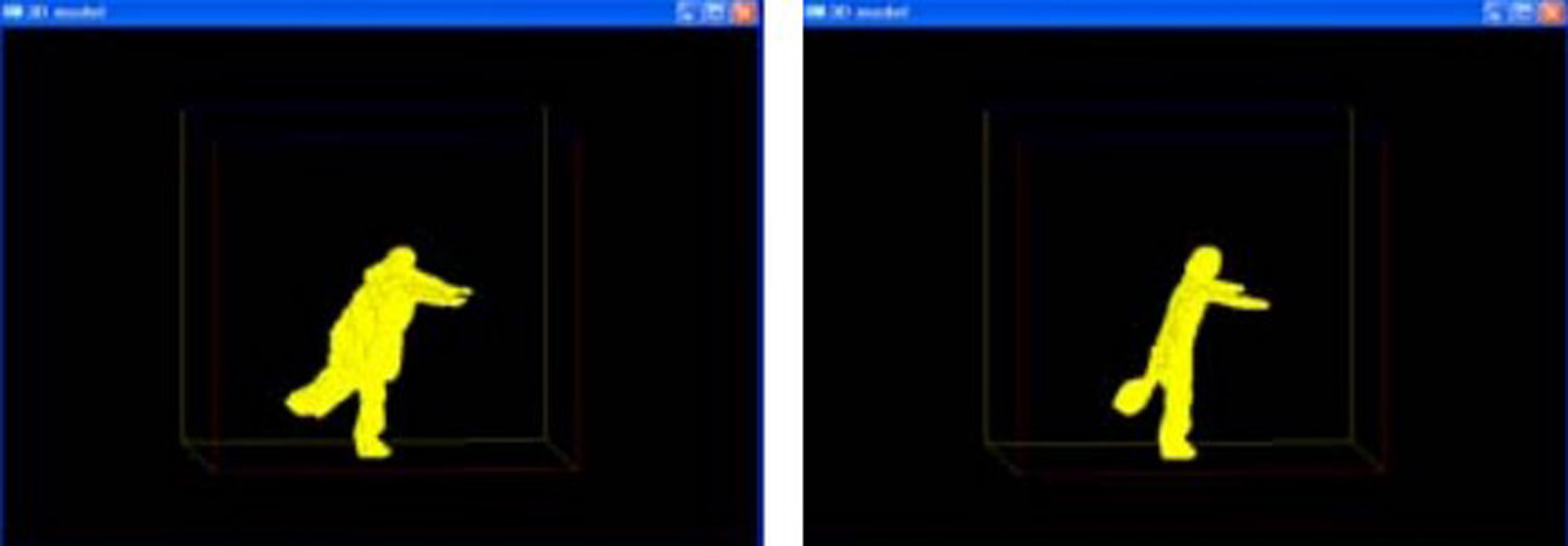
The goal of shape recovery is to derive a 3-D scene description from one or more 2-D images. In computer vision, the techniques to recover shape are called shape-from-X techniques, where X can be shading, motion, texture, silhouette, stereo, etc. We propose a new shape recovery algorithm using silhouette and disparity fields from stereo image sequences.
References:
1. Kim, H., Kitahara, I., Kogure. K., Hagita. N. and Sohn. K. 2004. Sat-Cam: “Personal Satellite Virtual Camera”, LNCS 3333, 87–94.
2. Kim. H., Min. D., Choi. S. and Sohn. K. 2005. Real-Time Disparity Estimation using Foreground Segmentation for Stereo Sequences, Optical Engineering (submitted).
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org