
“Real-time motion retargeting to highly varied user-created morphologies” by Hecker, Raabe, Enslow, DeWeese, Maynard, et al. …
Conference:
Type(s):
Title:
- Real-time motion retargeting to highly varied user-created morphologies
Presenter(s)/Author(s):
Abstract:
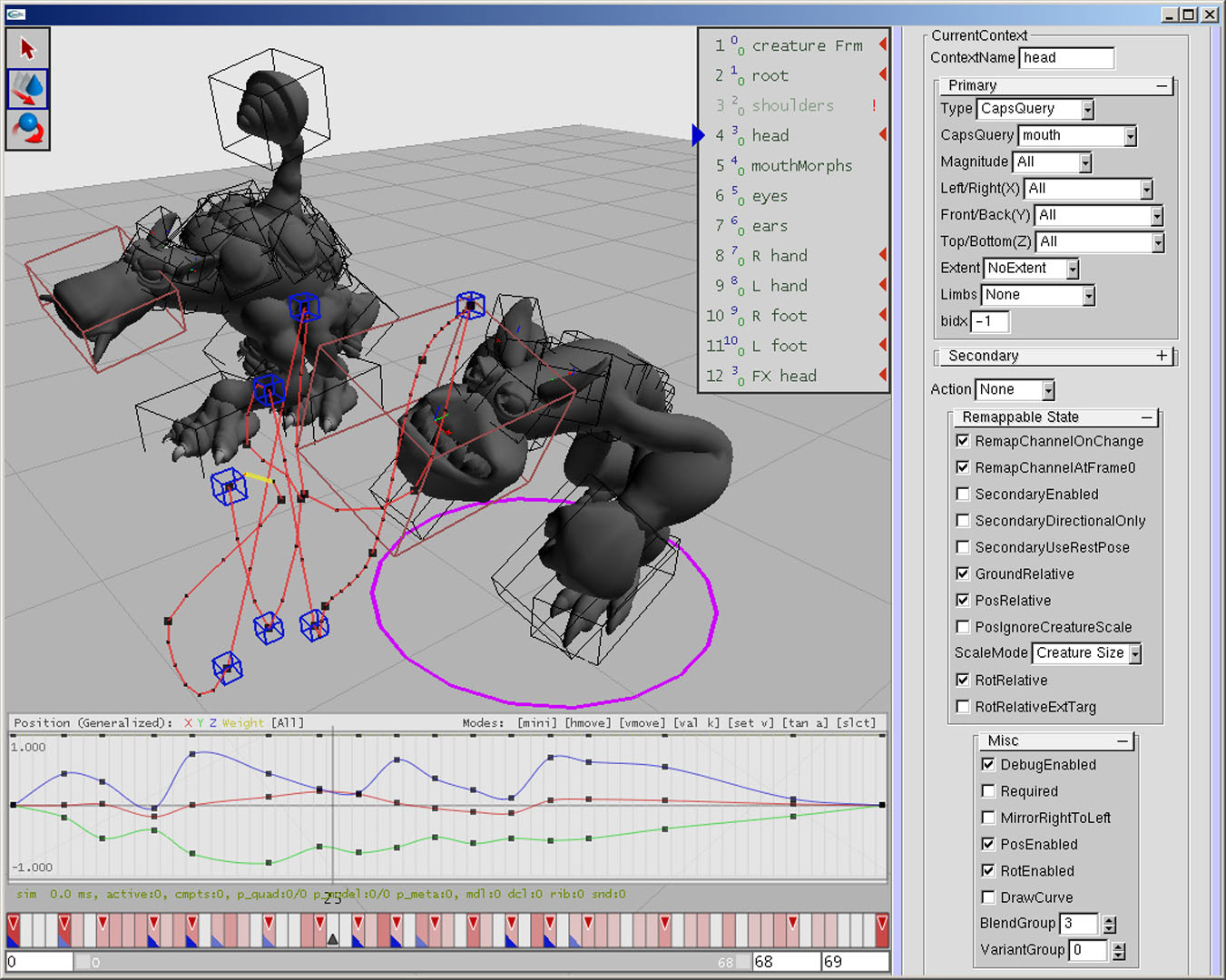
Character animation in video games—whether manually keyframed or motion captured—has traditionally relied on codifying skeletons early in a game’s development, and creating animations rigidly tied to these fixed skeleton morphologies. This paper introduces a novel system for animating characters whose morphologies are unknown at the time the animation is created. Our authoring tool allows animators to describe motion using familiar posing and key-framing methods. The system records the data in a morphology-independent form, preserving both the animation’s structural relationships and its stylistic information. At runtime, the generalized data are applied to specific characters to yield pose goals that are supplied to a robust and efficient inverse kinematics solver. This system allows us to animate characters with highly varying skeleton morphologies that did not exist when the animation was authored, and, indeed, may be radically different than anything the original animator envisioned.
References:
1. Alexander, R. M. 2003. Principles of Animal Locomotion. Princeton University Press.Google Scholar
2. Apple, Inc. 2008. Apple iTunes Smart Playlists. http://www.apple.com/lae/itunes/smartplaylists.html.Google Scholar
3. Autodesk, Inc. 2008. Autodesk Maya. http://www.autodesk.com/maya.Google Scholar
4. Barzel, R., Hughes, J. F., and Wood, D. N. 1996. Plausible motion simulation for computer graphics animation. In Computer Animation and Simulation ’96, 183–197. Google ScholarDigital Library
5. Barzel, R. 1997. Faking dynamics of ropes and springs. IEEE Comput. Graph. Appl. 17, 3, 31–39. Google ScholarDigital Library
6. Bruderlin, A., and Calvert, T. 1989. Goal-directed dynamic animation of human walking. In Proceedings of ACM SIGGRAPH 89, 233–242. Google ScholarDigital Library
7. Bruderlin, A., and Calvert, T. 1996. Knowledge-driven, interactive animation of human running. In Proceedings of Graphics Interface (GI’96), 213–221. Google ScholarDigital Library
8. Chi, D., Costa, M., Zhao, L., and Badler, N. 2000. The emote model for effort and shape. In Proceedings of ACM SIGGRAPH ’00, 173–182. Google ScholarDigital Library
9. Choi, K.-J., and Ko, H.-S. 2000. On-line motion retargeting. Journal of Visualization and Computer Animation 11, 223–243.Google ScholarCross Ref
10. Desmecht, L., and Dachary, L., 2006. Cal3d animation system. http://home.gna.org/cal3d.Google Scholar
11. Edery, D., Brown, M., Pallister, K., Koster, R., and Muzyka, R., 2007. Sharing control. Game Developers Conference 2007.Google Scholar
12. Girard, M., and Maciejewski, A. 1985. Computational modeling for the computer animation of legged figures. In Proceedings of ACM SIGGRAPH 1985, 263–270. Google ScholarDigital Library
13. Gleicher, M. 1998. Retargeting motion to new characters. In Proceedings of ACM SIGGRAPH 98, Annual Conference Series, ACM SIGGRAPH, 33–42. Google ScholarDigital Library
14. Grochow, K., Martin, S., Hertzmann, A., and Popović, Z. 2004. Style-based inverse kinematics. ACM Transactions on Graphics 23, 3. Google ScholarDigital Library
15. Horn, B. K. P. 1990. Relative orientation. International Journal of Computer Vision 4, 59–78. Google ScholarDigital Library
16. Jakobsen, T., 2001. Advanced character physics. Game Developers Conference 2001. http://www.teknikus.dk/tj/gdc2001.htm.Google Scholar
17. Kastenmeier, T., and Vesely, F. J. 1996. Numerical robot kinematics based on stochastic and molecular simulation methods. Robotica 14, 329–337.Google ScholarCross Ref
18. Klein, C., and Huang, C. 1983. Review of pseudoinverse control for use with kinematically redundant manipulators. IEEE Trans. Systems, Man, and Cybernetics 13, 2 (March/April), 245–250.Google Scholar
19. Kovar, L., and Gleicher, M. 2004. Automated extraction and parameterization of motions in large data sets. ACM Trans. Graph. 23, 3, 559–568. Google ScholarDigital Library
20. Kulpa, R., Multon, F., and Arnaldi, B. 2005. Morphology-independent representation of motions for interactive human-like animation. Computer Graphics Forum, Eurographics 2005 special issue 24, 3, 343–352.Google Scholar
21. Lasseter, J. 1987. Principles of traditional animation applied to 3d computer animation. In Proceedings of ACM SIGGRAPH ’87, 35–44. Google ScholarDigital Library
22. Lee, J., and Shin, S. Y. 1999. A hierarchical approach to interactive motion editing for human-like figures. In Proceedings of ACM SIGGRAPH 99, 39–48. Google ScholarDigital Library
23. Meredith, M., and Maddock, S. 2004. Using a half-jacobian for real-time inverse kinematics. In Procedings of The 5th International Conference on Computer Games: Artificial Intelligence, Design and Education, 81–88.Google Scholar
24. Mizuguchi, M., Buchanan, J., and Calvert, T. 2001. Data driven motion transitions for interactive games. In Eurographics 2001 Short Presentations.Google Scholar
25. Mozilla Foundation. 2008. Mozilla Thunderbird Message Filters. Tutorial at http://opensourcearticles.com/thunderbird_15/english/part_07.Google Scholar
26. Muratori, C., Roberts, J., Forsyth, T., and Moore, D., 2008. Granny 3d animation sdk. http://www.radgametools.com/granny/sdk.html.Google Scholar
27. Neff, M., and Fiume, E. 2005. Aer: aesthetic exploration and refinement for expressive character animation. In SCA ’05: Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation, 161–170. Google ScholarDigital Library
28. O’Brien, J. F., Zordan, V. B., and Hodgins, J. K. 2000. Combining active and passive simulations for secondary motion. IEEE Comput. Graph. Appl. 20, 4, 86–96. Google ScholarDigital Library
29. Popović, Z., and Witkin, A. 1999. Physically based motion transformation. In Proceedings of ACM SIGGRAPH 99, 11–20. Google ScholarDigital Library
30. Rotenberg, S., 2004. Locomotion. UCSD CSE169: Computer Animation Lecture Notes. Available at http://graphics.ucsd.edu/courses/cse169_w04/CSE169_13.ppt.Google Scholar
31. Ryckaert, J., Ciccotti, G., and Berendsen, H. 1977. Numerical integration of the cartesian equations of motion of a system with constraints: molecular dynamics of n-alkanes. Journal of Computational Physics 23, 327–341.Google ScholarCross Ref
32. Shin, H. J., Lee, J., Gleicher, M., and Shin, S. Y. 2001. Computer puppetry: an importance-based approach. ACM Transactions on Graphics 20, 2 (Apr.), 67–94. Google ScholarDigital Library
33. Sun, H. C., and Metaxas, D. N. 2001. Automating gait generation. In Proceedings of ACM SIGGRAPH ’01, 261–270. Google ScholarDigital Library
34. Tang, W., Cavazza, M., Mountain, D., and Earnshaw, R. 1999. A constrained inverse kinematics technique for realtime motion capture animation. The Visual Computer 15, 7–8 (November), 413–425.Google ScholarDigital Library
35. Thomas, F., and Johnston, O. 1981. Disney Animation, The Illusion of Life. Abbeville Press.Google Scholar
36. Tolani, D., Goswami, A., and Badler, N. I. 2000. Realtime inverse kinematics techniques for anthropomorphic limbs. Graphical models 62, 5, 353–388. Google Scholar
37. Welman, C. 1993. Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation. Master’s thesis, Simon Fraser University.Google Scholar
38. Willmott, A., Quigley, O., Choy, L., Sharp, B., and Ingram, R., 2007. Rigblocks: Player-deformable objects. SIGGRAPH 2007 Sketches. Google ScholarDigital Library
39. Wright, W., 2005. The future of content. Game Developers Conference 2005, March. http://video.google.com/videoplay?docid=-262774490184348066.Google Scholar
40. Yan, Y., Ohnishi, K., and Fukuda, T. 1999. Decentralized control of redundant manipulators: a control scheme that generates a cyclic solution to the inverse problem. In Proceedings of 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 404–409.Google Scholar
41. Zhao, J., and Badler, N. 1994. Inverse kinematics positioning using nonlinear programming for highly articulated figures. ACM Transactions on Graphics 13, 4 (Oct.), 313–336. Google ScholarDigital Library