
“Pliant motion: integration of virtual trajectory control into LCP based physics engines” by Tokizaki, Tazaki, Mitake and Hasegawa
Conference:
Type(s):
Title:
- Pliant motion: integration of virtual trajectory control into LCP based physics engines
Presenter(s)/Author(s):
Abstract:
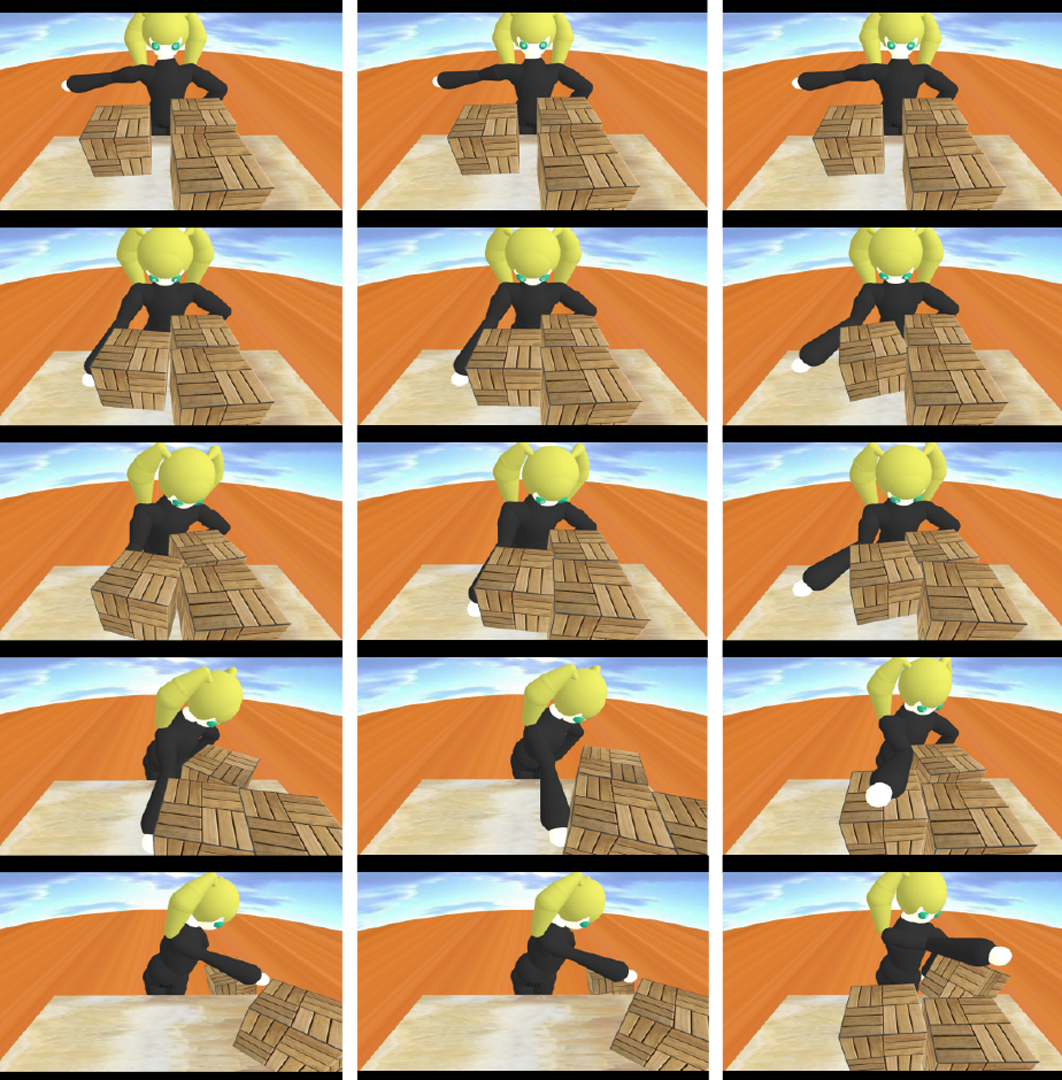
Interactive applications such as Video Games require characters, which generate motions corresponding to user’s interaction. Motion capture is an effective technique to reproduce realistic motion. However, to produce a motion which is appropriate to the operation of the user, a lot of motions must be prepared and one of the motions which is suitable for the user’s operation must be selected and played. Because the user’s operation changes the motion trajectory, unexpected contact to objects may happen. The amount of change on a trajectory depends on not only the trajectory of motion but also internal tensions of skeletal muscles – co-contraction level, when a person put one’s hand down on a table or collides with an object. [Hogan 1984] proposed that reaching motion of human is supposed to be generated by spring damper characteristics of muscles dragging to the virtual trajectory. Human controls not only trajectories of motions but also spring-damper characteristics of muscles by changing co-contraction levels. Realistic character motions contacting to objects can be generated easily with virtual trajectory tracking control which is integrated to physics engines for character motions.
References:
1. Hogan, N. 1984. An organizing principle for a class of voluntary movements. Journal of Neuroscience 4, 2745–2754.