
“Parallel processing techniques for hidden surface removal” by Kaplan and Greenberg
Conference:
Type(s):
Title:
- Parallel processing techniques for hidden surface removal
Presenter(s)/Author(s):
Abstract:
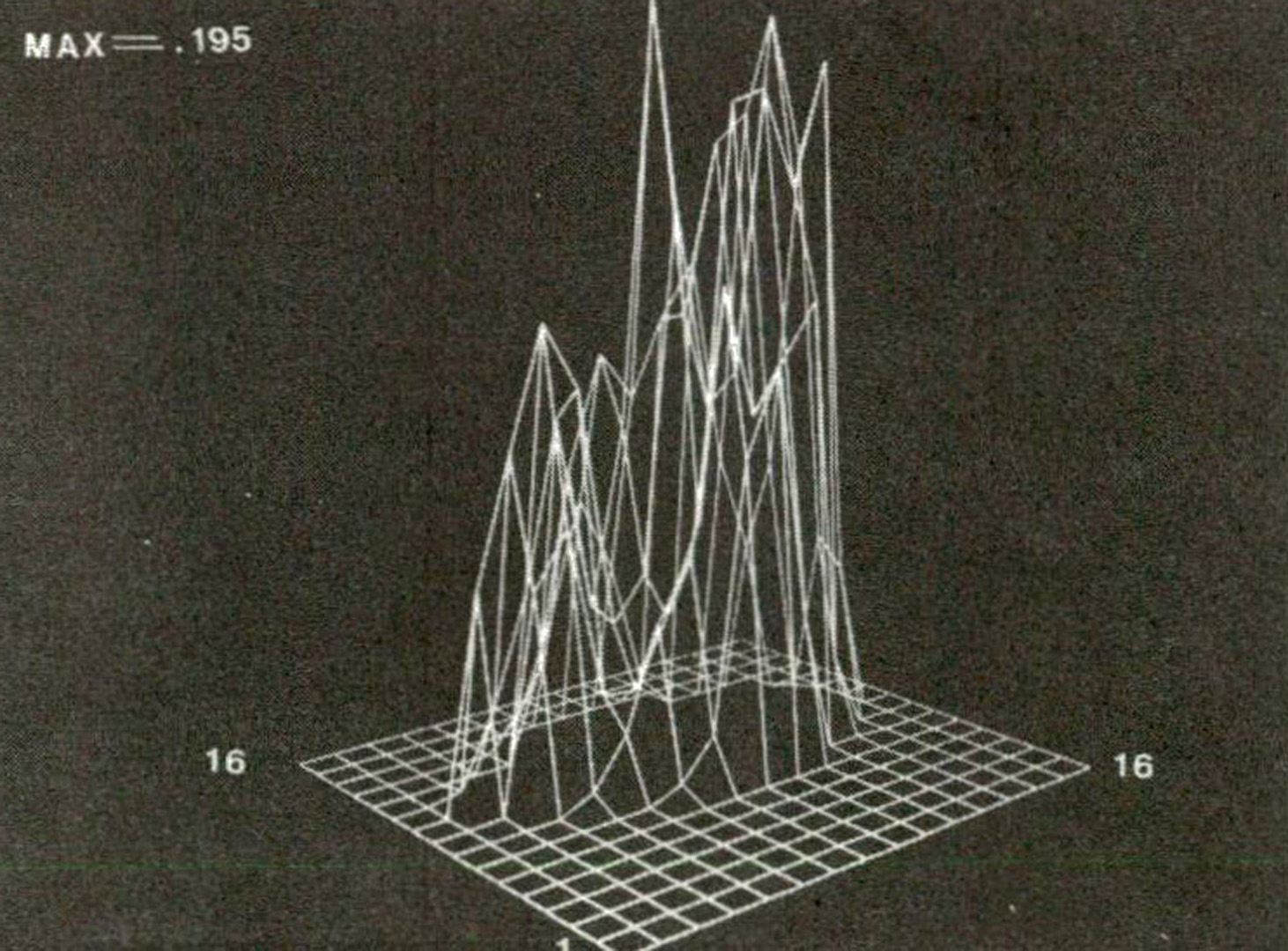
Previous work in the hidden-surface problem has revealed two key concepts. First, the removal of non-visible surfaces is essentially a sorting problem. Second, some form of coherence is essential for the efficient solution of this problem. In order to provide real-time simulations, it is not only the amount of sorting which must be reduced, but the total time required for computation. One potentially economic strategy to attain this goal is the use of parallel processor systems. This approach implies that the computational time will no longer be dependent on the total amount of sorting, but more on the appropriate division of responsibility. This paper investigates two existing algorithmic approaches to the hidden-surface problem with a view towards their applicability to implementation on a parallel machine organization. In particular, the statistical results of a parallel processor implementation indicate the difficulties stemming from a loss of coherence and imply potentially important design criteria for a parallel configuration.
References:
1. Sutherland, I., Sproull, R. and Schumacher, R., “A Characterization of Ten Hidden Surface Algorithms,” ACM Computing Surveys, Vol. 6, No. 1, (March 1974).
2. Watkins, G.S., “A Real-Time Visible Surface Algorithm,” Computer Science Department, University of Utah, UTECH-CSC-70-101, June 1970.
3. Romney, G.W., “Computer Assisted Assembly and Rendering of Solids,” Department of Computer Science, University of Utah, TR-4-20, 1970.
4. Hamlin, G., Jr., and Gear, C.W., “Raster-Scan Hidden Surface Algorithm Techniques,” Computer Graphics, Volume 11, No. 2, Summer 1977.
5. Warnock, J., “A Hidden Surface Algorithm for Computer Generated Halftone Pictures,” C.S. Tech. Report 4-15, University of Utah, June 1969.