
“Optimizing for aesthetically pleasing quadrotor camera motion” by Gebhardt, Stevsic and Hilliges
Conference:
Type(s):
Entry Number: 90
Title:
- Optimizing for aesthetically pleasing quadrotor camera motion
Session/Category Title: Taking Flight
Presenter(s)/Author(s):
Moderator(s):
Abstract:
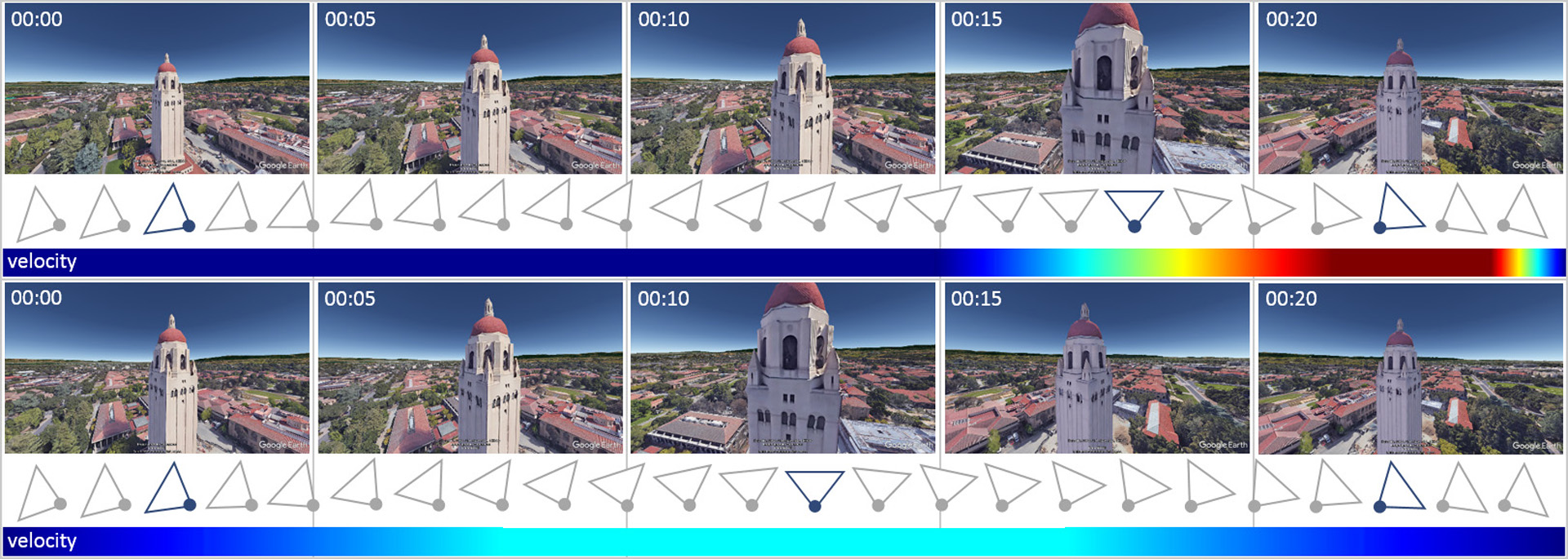
In this paper we first contribute a large scale online study (N ≈ 400) to better understand aesthetic perception of aerial video. The results indicate that it is paramount to optimize smoothness of trajectories across all keyframes. However, for experts timing control remains an essential tool. Satisfying this dual goal is technically challenging because it requires giving up desirable properties in the optimization formulation. Second, informed by this study we propose a method that optimizes positional and temporal reference fit jointly. This allows to generate globally smooth trajectories, while retaining user control over reference timings. The formulation is posed as a variable, infinite horizon, contour-following algorithm. Finally, a comparative lab study indicates that our optimization scheme outperforms the state-of-the-art in terms of perceived usability and preference of resulting videos. For novices our method produces smoother and better looking results and also experts benefit from generated timings.
References:
1. 3D Robotics. 2015. 3DR Solo. (2015). Retrieved September 13, 2016 from http://3drobotics.com/soloGoogle Scholar
2. A. Pedro Aguiar, Joao P. Hespanha, and Petar V. Kokotovic. 2008. Performance limitations in reference tracking and path following for nonlinear systems. Automatica 44, 3 (2008), 598 — 610. Google ScholarDigital Library
3. APM. 2016. APM Autopilot Suite. (2016). Retrieved September 13, 2016 from http://ardupilot.comGoogle Scholar
4. Daniel Arijon. 1976. Grammar of the film language. (1976).Google Scholar
5. Ty Audronis. 2014. How to Get Cinematic Drone Shots. (2014). Retrieved August 29, 2017 from https://www.videomaker.com/article/c6/17123-how-to-get-cinematic-drone-shotsGoogle Scholar
6. Sivakumar Balasubramanian, Alejandro Melendez-Calderon, Agnes Roby-Brami, and Etienne Burdet. 2015. On the analysis of movement smoothness. Journal of neuroengineering and rehabilitation 12, 1 (2015), 112.Google ScholarCross Ref
7. John T. Betts. 2009. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming (2nd ed.). Cambridge University Press, New York, NY, USA. Google ScholarDigital Library
8. Shaw Bronner and James Shippen. 2015. Biomechanical metrics of aesthetic perception in dance. Experimental Brain Research 233, 12 (01 Dec 2015), 3565–3581.Google Scholar
9. Adam Bry, Charles Richter, Abraham Bachrach, and Nicholas Roy. 2015. Aggressive flight of fixed-wing and quadrotor aircraft in dense indoor environments. The International Journal of Robotics Research 34, 7 (2015), 969–1002. Google ScholarDigital Library
10. Marc Christie, Patrick Olivier, and Jean-Marie Normand. 2008. Camera Control in Computer Graphics. Computer Graphics Forum 27, 8 (Dec. 2008), 2197–2218.Google ScholarCross Ref
11. DJI. 2016. PC Ground Station. (2016). Retrieved September 13, 2016 from http://www.dji.com/pc-ground-stationGoogle Scholar
12. Alexander Domahidi and Juan Jerez. 2017. FORCES Pro: code generation for embedded optimization. (2017). Retrieved September 4, 2017 from https://www.embotech.com/FORCES-ProGoogle Scholar
13. Steven M. Drucker and David Zeltzer. 1994. Intelligent Camera Control in a Virtual Environment. In In Proceedings of Graphics Interface ’94. 190–199.Google Scholar
14. T. Faulwasser, B. Kern, and R. Findeisen. 2009. Model predictive path-following for constrained nonlinear systems. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC). 8642–8647.Google Scholar
15. F. N. Fritsch and R. E. Carlson. 1980. Monotone Piecewise Cubic Interpolation. SIAM J. Numer. Anal. 17, 2 (1980), 238–246.Google ScholarDigital Library
16. Q. Galvane, J. Fleureau, F. L. Tariolle, and P. Guillotel. 2016. Automated Cinematography with Unmanned Aerial Vehicles. In Proceedings of the Eurographics Workshop on Intelligent Cinematography and Editing (WICED ’16). Eurographics Association, Goslar Germany, Germany, 23–30. Google ScholarDigital Library
17. Christoph Gebhardt, Benjamin Hepp, Tobias Nägeli, Stefan Stevšić, and Otmar Hilliges. 2016. Airways: Optimization-Based Planning of Quadrotor Trajectories According to High-Level User Goals. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (CHI ’16). ACM, New York, NY, USA, 2508–2519. Google ScholarDigital Library
18. Christoph Gebhardt and Otmar Hilliges. 2018. WYFIWYG: Investigating Effective User Support in Aerial Videography. (2018). arXiv:1801.05972Google Scholar
19. T. Geijtenbeek and N. Pronost. 2012. Interactive Character Animation Using Simulated Physics: A State-of-the-Art Review. Computer Graphics Forum 31, 8 (2012), 2492–2515. Google ScholarDigital Library
20. John Hennessy. 2015. 13 Powerful Tips to Improve Your Aerial Cinematography. (2015). Retrieved August 29, 2017 from https://skytango.com/13-powerful-tips-to-improve-your-aerial-cinematography/Google Scholar
21. Neville Hogan. 1984. Adaptive control of mechanical impedance by coactivation of antagonist muscles. IEEE Trans. Automat. Control 29, 8 (1984), 681–690.Google ScholarCross Ref
22. Niels Joubert, Dan B Goldman, Floraine Berthouzoz, Mike Roberts, James A Landay, Pat Hanrahan, et al. 2016. Towards a Drone Cinematographer: Guiding Quadrotor Cameras using Visual Composition Principles. (2016). arXiv:1610.01691Google Scholar
23. Niels Joubert, Mike Roberts, Anh Truong, Floraine Berthouzoz, and Pat Hanrahan. 2015. An Interactive Tool for Designing Quadrotor Camera Shots. ACM Trans. Graph. 34, 6, Article 238, 11 pages. Google ScholarDigital Library
24. Denise Lam, Chris Manzie, and Malcolm C. Good. 2013. Multi-axis model predictive contouring control. Internat. J. Control 86, 8 (2013), 1410–1424.Google ScholarCross Ref
25. Tsai-Yen Li and Chung-Chiang Cheng. 2008. Real-Time Camera Planning for Navigation in Virtual Environments. Springer Berlin Heidelberg, Berlin, Heidelberg, 118–129. Google ScholarDigital Library
26. Alexander Liniger, Alexander Domahidi, and Manfred Morari. 2014. Optimization-based autonomous racing of 1:43 scale RC cars. Optimal Control Applications and Methods (2014).Google Scholar
27. Christophe Lino and Marc Christie. 2012. Efficient Composition for Virtual Camera Control. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA ’12). Eurographics Association, Aire-la-Ville, Switzerland, Switzerland, 65–70. Google ScholarDigital Library
28. Christophe Lino and Marc Christie. 2015. Intuitive and Efficient Camera Control with the Toric Space. ACM Trans. Graph. 34, 4, Article 82 (July 2015), 12 pages. Google ScholarDigital Library
29. Christophe Lino, Marc Christie, Roberto Ranon, and William Bares. 2011. The Director’s Lens: An Intelligent Assistant for Virtual Cinematography. In Proceedings of the 19th ACM International Conference on Multimedia (MM ’11). ACM, New York, NY, USA, 323–332. Google ScholarDigital Library
30. C. Karen Liu, Aaron Hertzmann, and Zoran Popović. 2006. Composition of Complex Optimal Multi-character Motions. In Proceedings of the 2006 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA ’06). Eurographics Association, Aire-la-Ville, Switzerland, Switzerland, 215–222. http://dl.acm.org/citation.cfm?id=1218064.1218093 Google ScholarDigital Library
31. James McCann, Nancy S Pollard, and Siddhartha Srinivasa. 2006. Physics-based motion retiming. In Proceedings of the 2006 ACM SIGGRAPH/Eurographics symposium on Computer animation. Eurographics Association, 205–214. Google ScholarDigital Library
32. D. Mellinger and V. Kumar. 2011. Minimum snap trajectory generation and control for quadrotors. In 2011 IEEE International Conference on Robotics and Automation. 2520–2525.Google Scholar
33. D Mellinger, N Michael, and V Kumar. 2012. Trajectory Generation and Control for Precise Aggressive Maneuvers with Quadrotors. The International Journal of Robotics Research 31, 5 (2012), 664–674. Google ScholarDigital Library
34. H. Michalska and D. Q. Mayne. 1993. Robust receding horizon control of constrained nonlinear systems. IEEE Trans. Automat. Control 38, 11 (Nov 1993), 1623–1633.Google ScholarCross Ref
35. M.W. Mueller and R. D’Andrea. 2013. A model predictive controller for quadrocopter state interception. In Proceedings of the European Control Conference (ECC), 2013. 1383–1389. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6669415Google ScholarCross Ref
36. T. Naegeli, J. Alonso-Mora, A. Domahidi, D. Rus, and O. Hilliges. 2017. Real-time Motion Planning for Aerial Videography with Dynamic Obstacle Avoidance and Viewpoint Optimization. IEEE Robotics and Automation Letters PP, 99 (2017), 1–1.Google Scholar
37. Tobias Nägeli, Lukas Meier, Alexander Domahidi, Javier Alonso-Mora, and Otmar Hilliges. 2017. Real-time Planning for Automated Multi-view Drone Cinematography. ACM Trans. Graph. 36, 4, Article 132 (July 2017), 10 pages. Google ScholarDigital Library
38. Mike Roberts and Pat Hanrahan. 2016. Generating Dynamically Feasible Trajectories for Quadrotor Cameras. ACM Trans. Graph. 35, 4, Article 61 (July 2016), 11 pages. Google ScholarDigital Library
39. VC Technology. 2016. Litchi Tool. (2016). Retrieved September 13, 2016 from https://flylitchi.com/Google Scholar
40. Andrew Witkin and Michael Kass. 1988. Spacetime Constraints. In Proceedings of the 15th Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’88). ACM, New York, NY, USA, 159–168. Google ScholarDigital Library
41. I-Cheng Yeh, Chao-Hung Lin, Hung-Jen Chien, and Tong-Yee Lee. 2011. Efficient camera path planning algorithm for human motion overview. Computer Animation and Virtual Worlds 22, 2-3 (2011), 239–250. Google ScholarDigital Library