
“Optimization-based animation” by Milenkovic and Schmidl
Conference:
Type(s):
Title:
- Optimization-based animation
Presenter(s)/Author(s):
Abstract:
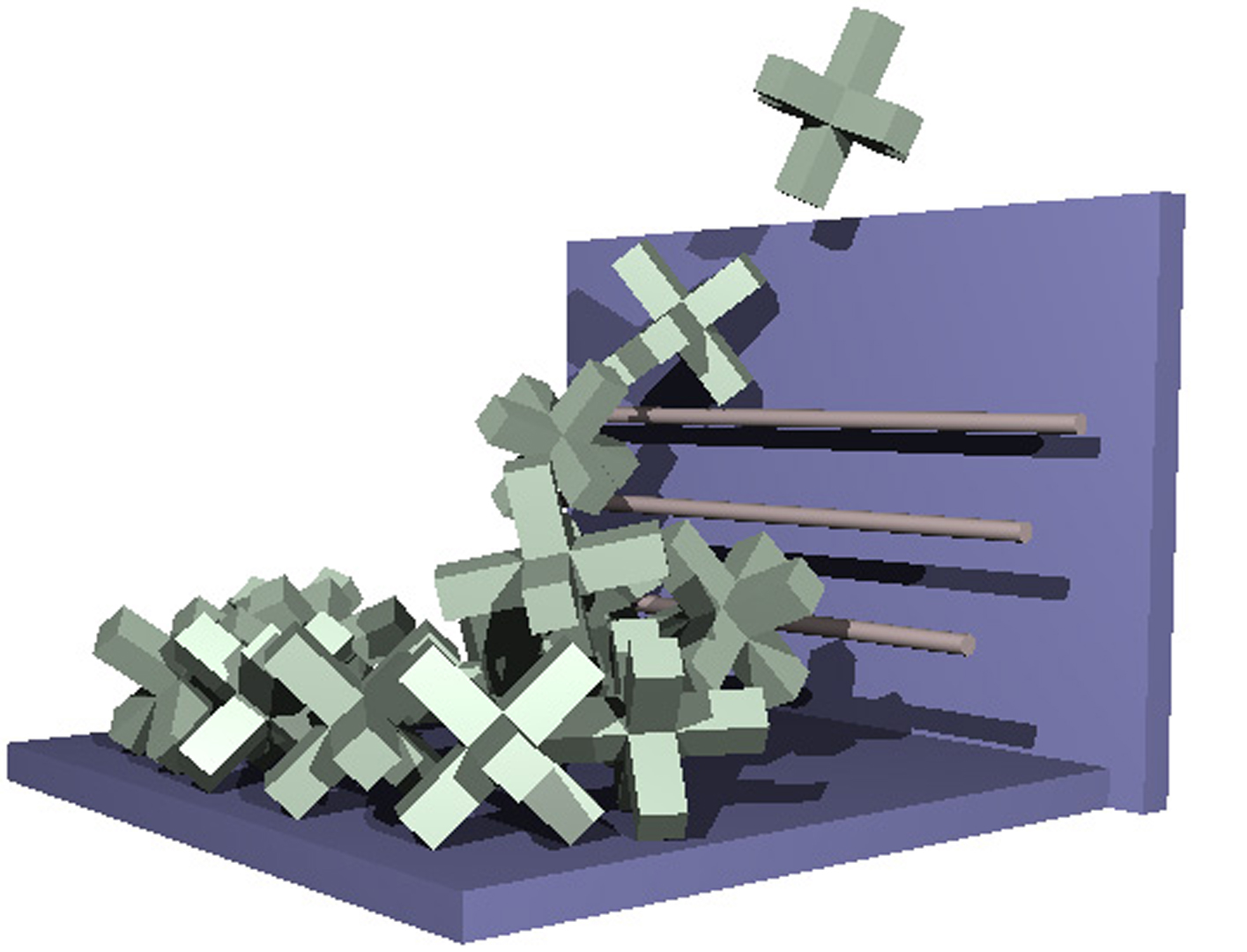
Current techniques for rigid body simulation run slowly on scenes with many bodies in close proximity. Each time two bodies collide or make or break a static contact, the simulator must interrupt the numerical integration of velocities and accelerations. Even for simple scenes, the number of discontinuities per frame time can rise to the millions. An efficient optimization-based animation (OBA) algorithm is presented which can simulate scenes with many convex three-dimensional bodies settling into stacks and other “crowded” arrangements. This algorithm simulates Newtonian (second order) physics and Coulomb friction, and it uses quadratic programming (QP) to calculate new positions, momenta and accelerations strictly at frame times. Contact points are synchronized at the end of each frame. The extremely small integration steps inherent to traditional simulation techniques are avoided. Non-convex bodies are simulated as unions of convex bodies. Links and joints are simulated successfully with bi-directional constraints. A hybrid of OBA and retroactive detection (RD) has been implemented as well. A review of existing work finds no other packages that can simulate similarly complex scenes in a practical amount of time.
References:
1. William W. Armstrong and Mark W. Green. The dynamics of articulated rigid bodies for purposes of animation. The Visual Computer, 1:231-240, 1985.
2. David Baraff. Analytical methods for dynamic simulation of non-penetrating rigid bodies. SIGGRAPH 89 Conference Proceedings, pages 223-232, 1989.
3. David Baraff. Fast contact force computation for nonpenetrating rigid bodies. SIGGRAPH 94 Conference Proceedings, pages 23-34, 1994.
4. David Baraff and Andrew Witkin. Dynamic simulation of non-penetrating flexible bodies. SIGGRAPH 92 Conference Proceedings, pages 303-308, 1992.
5. David Baraff and Andrew Witkin. Large steps in cloth simulation. SIGGRAPH 98 Conference Proceedings, pages 43-52, 1998.
6. Ronen Barzel and Alan H. Barr. A modeling system based on dynamic constraints. SIGGRAPH 88 Conference Proceedings, pages 179-187, 1988.
7. Raymond M. Brach. Rigid body collisions. Journal of Applied Mechanics, 56:133-138, March 1989.
8. Steven Chenney and D.A. Forsyth. Sampling plausible solutions to multi-body constraint problems. SIGGRAPH 00 Conference Proceedings, pages 219-228, 2000.
9. Jonathan C. Cohen, Ming C. Lin, Dinesh Manocha, and Madhav K. Ponamgi. I-COLLIDE: An interactive and exact collision detection system for large-scaled environments. Symposium on Interactive 3D Graphics, pages 189-196, 1995.
10. S. A. Ehmann and M. C. Lin. SWIFT: Accelerated proximity queries between convex polyhedra by multi-level voronoi marching. Technical report, Computer Science Department, University of North Carolina at Chapel Hill, 2000.
11. Herbert Goldstein. Klassische Mechanik. AULA Verlag Wiesbaden, 11. Auflage, 1991.
12. J.B. Keller. Impact with friction. Journal of Applied Mechanics, 53:1-4, March 1986.
13. Iraklis Kourtidis. Distributed rotational polygon compaction. Master’s thesis, University of Miami, May 2000.
14. Z. Li and Victor Milenkovic. Compaction and separation algorithms for non-convex polygons and their applications. European Journal of Operations Research, 84:539-561, 1995.
15. Ming Lin and John Canny. A fast algorithm for incremental distance calculation. International Conference on Robotics and Automation, pages 1008-1014, 1991.
16. Per Lotstedt. Coulomb friction in two-dimensional rigid body systems. Zeitschrift fur angewandte Mathematik und Mechanik, 61:605-615, 1981.
17. V. J. Milenkovic. Rotational polygon overlap minimization and compaction. Computational Geometry: Theory and Applications, 10:305-318, 1998.
18. Victor J. Milenkovic. Position-based physics: Simulating the motion of many highly interacting spheres and polyhe-dra. SIGGRAPH 96 Conference Proceedings, pages 129-136, 1996.
19. Brian Mirtich. Impulse-based simulation of rigid bodies. Pro-ceedings of the 1995 Symposium on Interactive 3D Graphics, pages 181-189, 1995.
20. Brian Mirtich. V-Clip: Fast and robust polyhedral collision detection. Transactions on Graphics, 17(3):177-208, 1998.
21. Brian Mirtich. Timewarp rigid body simulation. SIGGRAPH 00 Conference Proceedings, pages 193-200, 2000.
22. Mathew Moore and Jane Wilhelms. Collision detection and response for computer animation. SIGGRAPH 88 Conference Proceedings, pages 289-297, 1988.
23. James F. O’Brien and Jessica K. Hodgins. Graphical model-ing and animation of brittle fracture. SIGGRAPH 99 Confer-ence Proceedings, pages 137-146, 1999.
24. Jorg Sauer and Elmar Schomer. A constraint-based approach to rigid body dynamics for virtual reality applications. Pro-ceedings of the ACM Symposium on Virtual Reality Software and Technology, pages 153-162, 1998.
25. David Stewart and Jeff C. Trinkle. An implicit time-stepping scheme for rigid body dynamics with inelastic collisions and coulomb friction. In Zeitschrift fur Angewandte Mathematik und Mechanik, 77(4):267-279, 1997.