
“Noise-resilient Reconstruction of Panoramas and 3D Scenes Using Robot-mounted Unsynchronized Commodity RGB-D Cameras” by Yang, Li, Cao, Fu, Lai, et al. …
Conference:
Type(s):
Title:
- Noise-resilient Reconstruction of Panoramas and 3D Scenes Using Robot-mounted Unsynchronized Commodity RGB-D Cameras
Session/Category Title: RGB++: Depth, 3D, and Light Fields
Presenter(s)/Author(s):
Abstract:
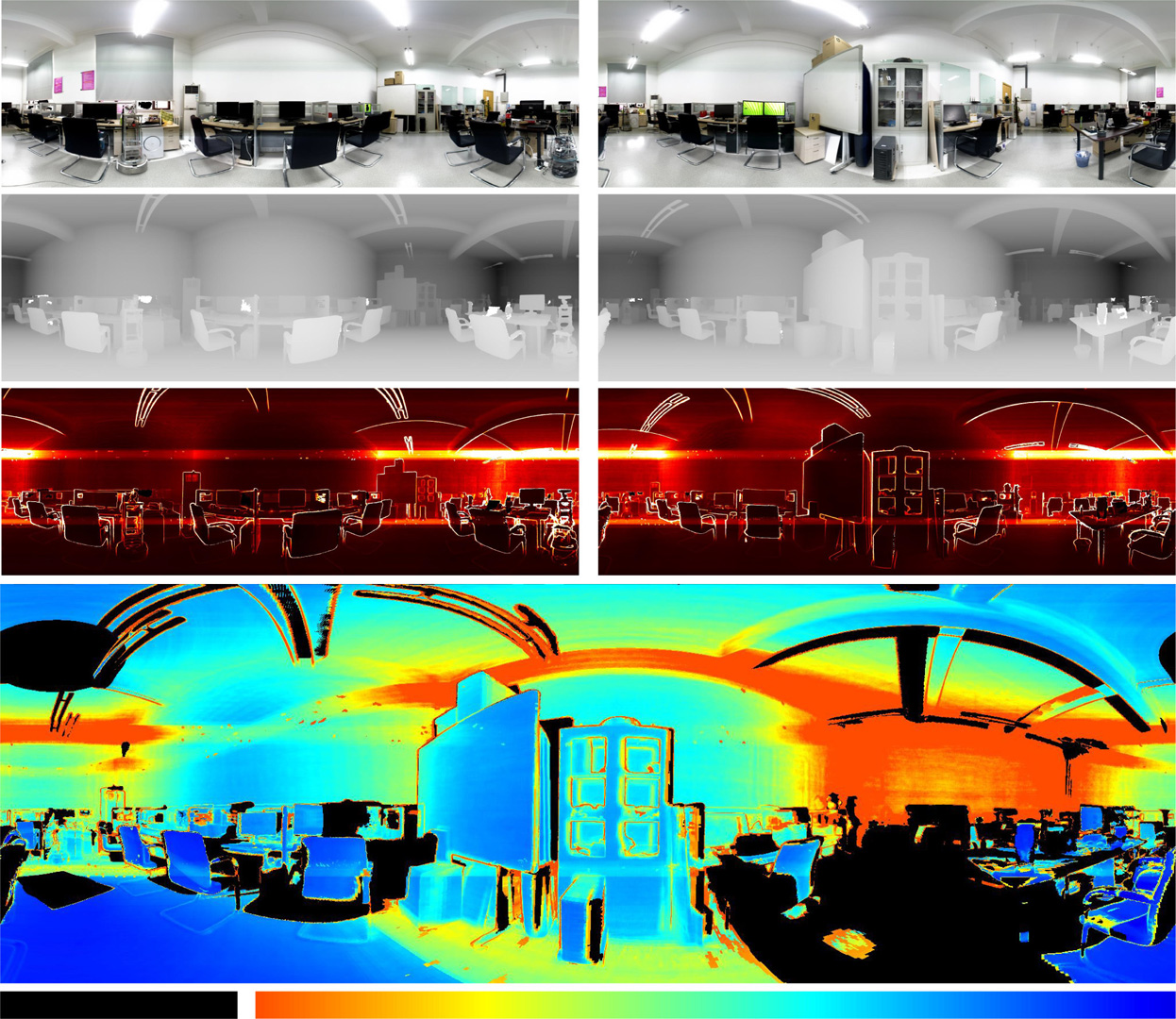
We present a two-stage approach to first constructing 3D panoramas and then stitching them for noise-resilient reconstruction of large-scale indoor scenes. Our approach requires multiple unsynchronized RGB-D cameras, mounted on a robot platform, which can perform in-place rotations at different locations in a scene. Such cameras rotate on a common (but unknown) axis, which provides a novel perspective for coping with unsynchronized cameras, without requiring sufficient overlap of their Field-of-View (FoV). Based on this key observation, we propose novel algorithms to track these cameras simultaneously. Furthermore, during the integration of raw frames onto an equirectangular panorama, we derive uncertainty estimates from multiple measurements assigned to the same pixels. This enables us to appropriately model the sensing noise and consider its influence, so as to achieve better noise resilience, and improve the geometric quality of each panorama and the accuracy of global inter-panorama registration. We evaluate and demonstrate the performance of our proposed method for enhancing the geometric quality of scene reconstruction from both real-world and synthetic scans.