
“Model Predictive Control With a Visuomotor System for Physics-based Character Animation” by Eom, Han, Shin and Noh
Conference:
Type(s):
Title:
- Model Predictive Control With a Visuomotor System for Physics-based Character Animation
Session/Category Title: Physically-Based Character Animation
Presenter(s)/Author(s):
Abstract:
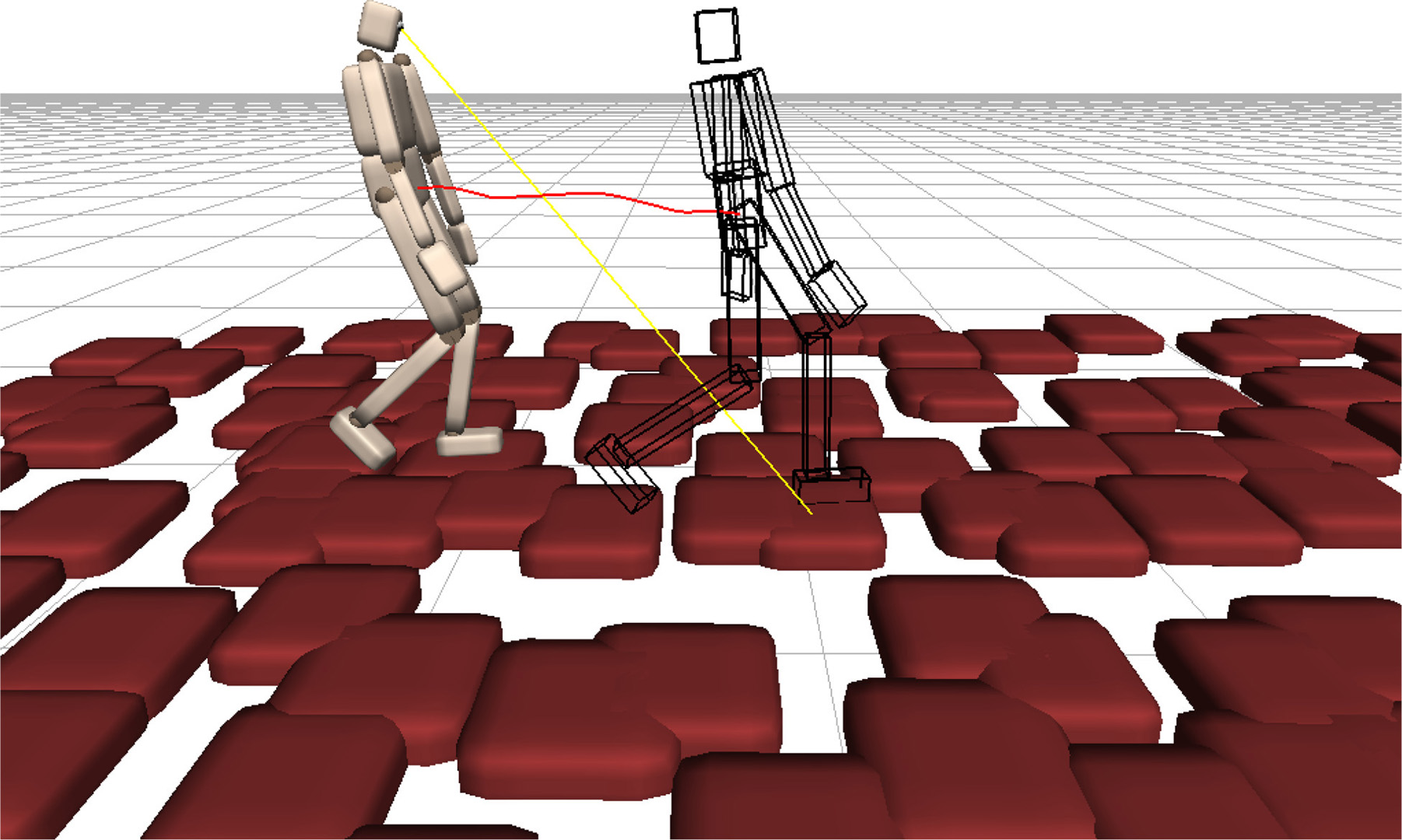
This article presents a Model Predictive Control framework with a visuomotor system that synthesizes eye and head movements coupled with physics-based full-body motions while placing visual attention on objects of importance in the environment. As the engine of this framework, we propose a visuomotor system based on human visual perception and full-body dynamics with contacts. Relying on partial observations with uncertainty from a simulated visual sensor, an optimal control problem for this system leads to a Partially Observable Markov Decision Process, which is difficult to deal with. We approximate it as a deterministic belief Markov Decision Process for effective control. To obtain a solution for the problem efficiently, we adopt differential dynamic programming, which is a powerful scheme to find a locally optimal control policy for nonlinear system dynamics. Guided by a reference skeletal motion without any a priori gaze information, our system produces realistic eye and head movements together with full-body motions for various tasks such as catching a thrown ball, walking on stepping stones, balancing after being pushed, and avoiding moving obstacles.