
“Meshless visual and haptic interaction from a real-time depth image” by Lee, Kim, Cheng, Park, Ko, et al. …

Conference:
Type(s):
Title:
- Meshless visual and haptic interaction from a real-time depth image
Presenter(s)/Author(s):
Abstract:
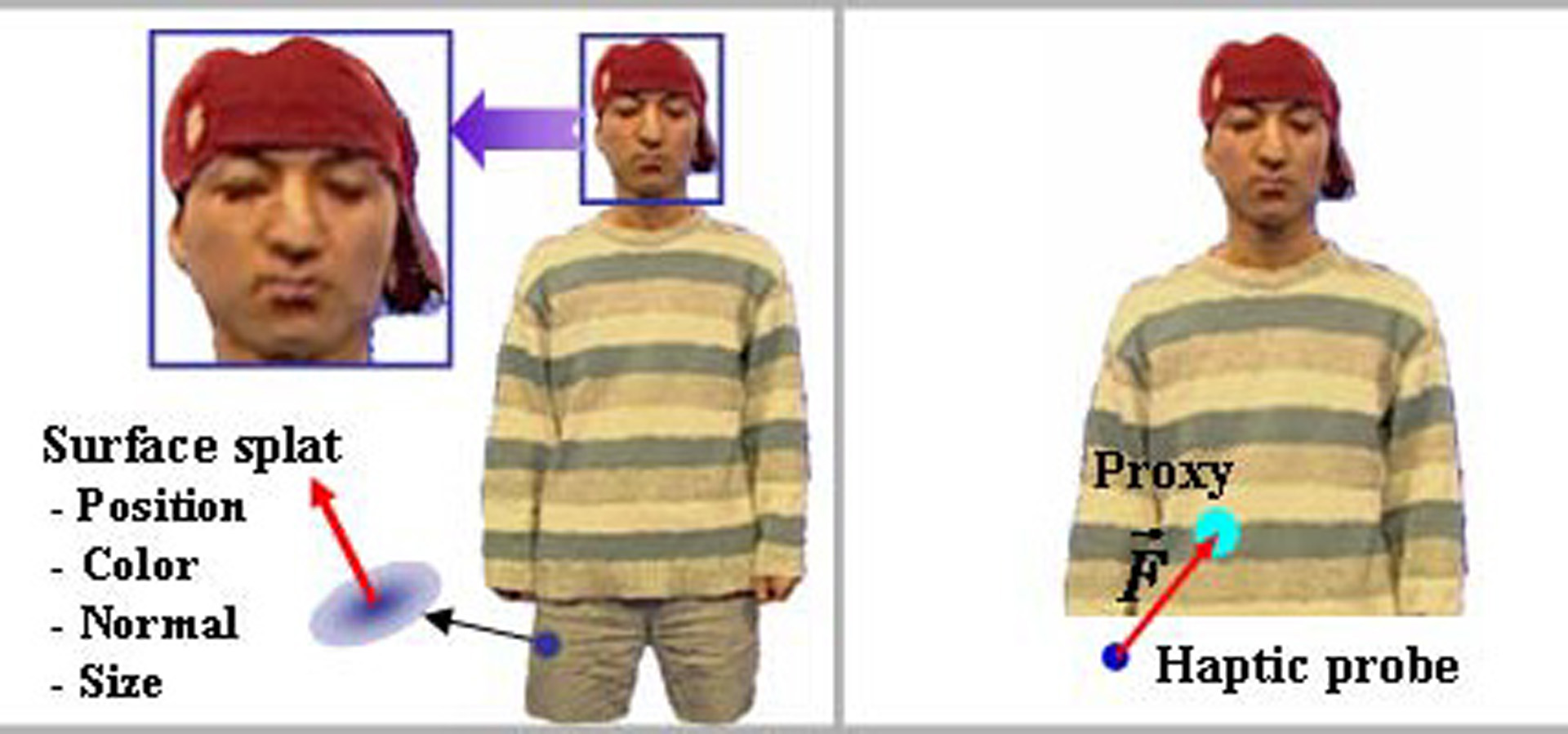
Recently, the technological advance of 3D depth sensors such as the Z-Cam[1] has made it possible to acquire a dynamic real object in real time(See Fig 1.(a)). The raw depth image is time-consuming to generate connectivity or pre-computed hierarchical data structure from the heavy data set in order to perform graphic and haptic interaction. In this paper, therefore, we propose mesh-less graphic and haptic rendering algorithm based on the point-based techniques by utilizing graphics hardware for providing efficient visualization and haptic interaction from a depth image acquired in real time.
References:
1. http://www.3dvsystems.com/.
2. J. P. Kim, B. C. Lee, and J Ryu, “Haptic Rendering for Hybrid Environments”, ACM SIGGRAPH 2005, research poster, 2005.
Additional Images:
