
“Learning high-DOF reaching-and-grasping via dynamic representation of gripper-object interaction” by She, Hu, Xu, Liu, Xu, et al. …
Conference:
Type(s):
Title:
- Learning high-DOF reaching-and-grasping via dynamic representation of gripper-object interaction
Presenter(s)/Author(s):
Abstract:
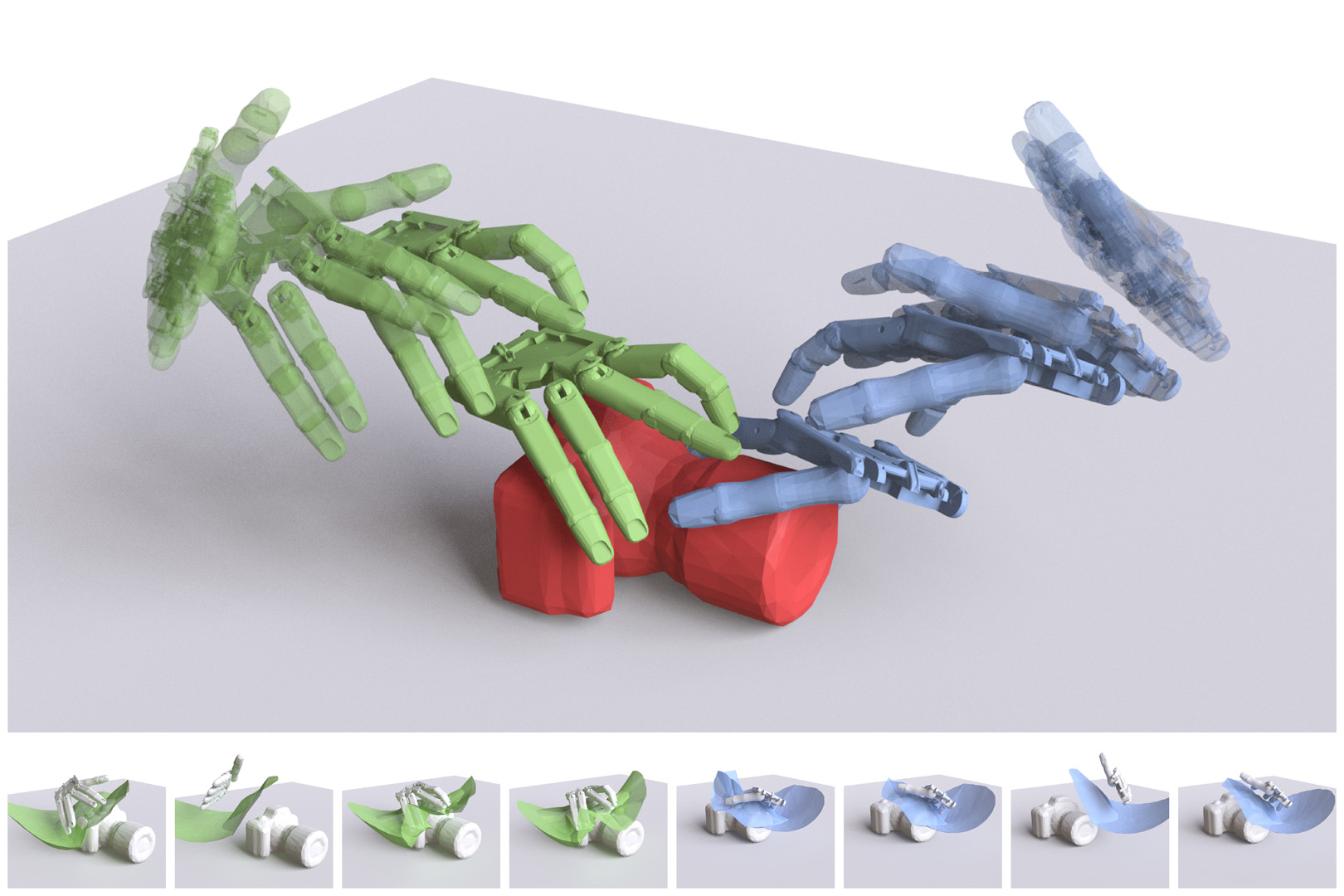
We approach the problem of high-DOF reaching-and-grasping via learning joint planning of grasp and motion with deep reinforcement learning. To resolve the sample efficiency issue in learning the high-dimensional and complex control of dexterous grasping, we propose an effective representation of grasping state characterizing the spatial interaction between the gripper and the target object. To represent gripper-object interaction, we adopt Interaction Bisector Surface (IBS) which is the Voronoi diagram between two close by 3D geometric objects and has been successfully applied in characterizing spatial relations between 3D objects. We found that IBS is surprisingly effective as a state representation since it well informs the finegrained control of each finger with spatial relation against the target object. This novel grasp representation, together with several technical contributions including a fast IBS approximation, a novel vector-based reward and an effective training strategy, facilitate learning a strong control model of high-DOF grasping with good sample efficiency, dynamic adaptability, and cross-category generality. Experiments show that it generates high-quality dexterous grasp for complex shapes with smooth grasping motions. Code and data for this paper are at https://github.com/qijinshe/IBS-Grasping.
References:
1. Jacopo Aleotti and Stefano Caselli. 2012. A 3D shape segmentation approach for robot grasping by parts. Robotics and Autonomous Systems 60, 3 (2012), 358–366.Google ScholarDigital Library
2. OpenAI: Marcin Andrychowicz, Bowen Baker, Maciek Chociej, Rafal Jozefowicz, Bob McGrew, Jakub Pachocki, Arthur Petron, Matthias Plappert, Glenn Powell, Alex Ray, et al. 2020. Learning dexterous in-hand manipulation. The International Journal of Robotics Research 39, 1 (2020), 3–20.Google ScholarDigital Library
3. Jeannette Bohg, Antonio Morales, Tamim Asfour, and Danica Kragic. 2013. Data-driven grasp synthesis—a survey. IEEE Transactions on Robotics 30, 2 (2013), 289–309.Google ScholarDigital Library
4. Samarth Brahmbhatt, Chengcheng Tang, Christopher D Twigg, Charles C Kemp, and James Hays. 2020. ContactPose: A dataset of grasps with object contact and hand pose. In Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part XIII 16. Springer, 361–378.Google Scholar
5. Berk Calli, Arjun Singh, James Bruce, Aaron Walsman, Kurt Konolige, Siddhartha Srinivasa, Pieter Abbeel, and Aaron M Dollar. 2017. Yale-CMU-Berkeley dataset for robotic manipulation research. The International Journal of Robotics Research 36, 3 (2017), 261–268.Google ScholarDigital Library
6. I-Ming Chen and Joel W Burdick. 1993. Finding antipodal point grasps on irregularly shaped objects. IEEE transactions on Robotics and Automation 9, 4 (1993), 507–512.Google Scholar
7. Alvaro Collet and Siddhartha S Srinivasa. 2010. Efficient multi-view object recognition and full pose estimation. In 2010 IEEE International Conference on Robotics and Automation. IEEE, 2050–2055.Google ScholarCross Ref
8. Cosimo Della Santina, Visar Arapi, Giuseppe Averta, Francesca Damiani, Gaia Fiore, Alessandro Settimi, Manuel G Catalano, Davide Bacciu, Antonio Bicchi, and Matteo Bianchi. 2019. Learning from humans how to grasp: a data-driven architecture for autonomous grasping with anthropomorphic soft hands. IEEE Robotics and Automation Letters 4, 2 (2019), 1533–1540.Google ScholarCross Ref
9. Amaury Depierre, Emmanuel Dellandréa, and Liming Chen. 2018. Jacquard: A large scale dataset for robotic grasp detection. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 3511–3516.Google ScholarDigital Library
10. Raffaele Di Gregorio. 2008. A novel point of view to define the distance between two rigid-body poses. In Advances in robot kinematics: Analysis and design. Springer, 361–369.Google Scholar
11. Clemens Eppner, Raphael Deimel, José Alvarez-Ruiz, Marianne Maertens, and Oliver Brock. 2015. Exploitation of environmental constraints in human and robotic grasping. The International Journal of Robotics Research 34, 7 (2015), 1021–1038.Google ScholarDigital Library
12. Kuan Fang, Yunfei Bai, Stefan Hinterstoisser, Silvio Savarese, and Mrinal Kalakrishnan. 2018. Multi-Task Domain Adaptation for Deep Learning of Instance Grasping from Simulation. IEEE International Conference on Robotics and Automation (ICRA) (2018).Google ScholarDigital Library
13. Carlo Ferrari and John F Canny. 1992. Planning optimal grasps.. In ICRA, Vol. 3. 2290–2295.Google Scholar
14. F Ficuciello, A Migliozzi, G Laudante, P Falco, and B Siciliano. 2019. Vision-based grasp learning of an anthropomorphic hand-arm system in a synergy-based control framework. Science robotics 4, 26 (2019).Google Scholar
15. Fanny Ficuciello, Damiano Zaccara, and Bruno Siciliano. 2016. Synergy-based policy improvement with path integrals for anthropomorphic hands. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 1940–1945.Google ScholarDigital Library
16. Joan Fontanals, Bao-Anh Dang-Vu, Oliver Porges, Jan Rosell, and Máximo A Roa. 2014. Integrated grasp and motion planning using independent contact regions. In 2014 IEEE-RAS International Conference on Humanoid Robots. IEEE, 887–893.Google ScholarCross Ref
17. Marcus Gualtieri, Andreas Ten Pas, Kate Saenko, and Robert Platt. 2016. High precision grasp pose detection in dense clutter. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 598–605.Google ScholarDigital Library
18. Tuomas Haarnoja, Aurick Zhou, Kristian Hartikainen, George Tucker, Sehoon Ha, Jie Tan, Vikash Kumar, Henry Zhu, Abhishek Gupta, Pieter Abbeel, et al. 2018. Soft actor-critic algorithms and applications. arXiv preprint arXiv:1812.05905 (2018).Google Scholar
19. Kaiyu Hang, Johannes A. Stork, Nancy S. Pollard, and Danica Kragic. 2017. A Framework for Optimal Grasp Contact Planning. IEEE Robotics and Automation Letters 2, 2 (2017), 704–711. Google ScholarCross Ref
20. Ruizhen Hu, Chenyang Zhu, Oliver van Kaick, Ligang Liu, Ariel Shamir, and Hao Zhang. 2015. Interaction context (ICON) towards a geometric functionality descriptor. ACM Transactions on Graphics 34, 4 (2015), 1–12.Google ScholarDigital Library
21. Divye Jain, Andrew Li, Shivam Singhal, Aravind Rajeswaran, Vikash Kumar, and Emanuel Todorov. 2019. Learning Deep Visuomotor Policies for Dexterous Hand Manipulation. In International Conference on Robotics and Automation (ICRA).Google Scholar
22. Stephen James, Paul Wohlhart, Mrinal Kalakrishnan, Dmitry Kalashnikov, Alex Irpan, Julian Ibarz, Sergey Levine, Raia Hadsell, and Konstantinos Bousmalis. 2019. Sim-to-real via sim-to-sim: Data-efficient robotic grasping via randomized-to-canonical adaptation networks. In Proc. IEEE Conf. on Computer Vision & Pattern Recognition. 12627–12637.Google ScholarCross Ref
23. Dmitry Kalashnikov, Alex Irpan, Peter Pastor, Julian Ibarz, Alexander Herzog, Eric Jang, Deirdre Quillen, Ethan Holly, Mrinal Kalakrishnan, Vincent Vanhoucke, et al. 2018. Qt-opt: Scalable deep reinforcement learning for vision-based robotic manipulation. arXiv preprint arXiv:1806.10293 (2018).Google Scholar
24. Daniel Kappler, Jeannette Bohg, and Stefan Schaal. 2015. Leveraging big data for grasp planning. In 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 4304–4311.Google ScholarCross Ref
25. Korrawe Karunratanakul, Jinlong Yang, Yan Zhang, Michael Black, Krikamol Muandet, and Siyu Tang. 2020. Grasping Field: Learning Implicit Representations for Human Grasps. arXiv preprint arXiv:2008.04451 (2020).Google Scholar
26. Alexander Kasper, Zhixing Xue, and Rüdiger Dillmann. 2012. The KIT object models database: An object model database for object recognition, localization and manipulation in service robotics. The International Journal of Robotics Research 31, 8 (2012), 927–934.Google ScholarCross Ref
27. Lydia E Kavraki, Petr Svestka, J-C Latombe, and Mark H Overmars. 1996. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE transactions on Robotics and Automation 12, 4 (1996), 566–580.Google ScholarCross Ref
28. Marios Kiatos and Sotiris Malassiotis. 2019. Grasping Unknown Objects by Exploiting Complementarity with Robot Hand Geometry. In International Conference on Computer Vision Systems. Springer, 88–97.Google ScholarCross Ref
29. Chong-Min Kim, Chung-InWon, Youngsong Cho, Donguk Kim, Sunghoon Lee, Jonghwa Bhak, and Deok-Soo Kim. 2006. Interaction interfaces in proteins via the Voronoi diagram of atoms. Computer-Aided Design 38, 11 (2006), 1192–1204.Google ScholarDigital Library
30. Kilian Kleeberger, Richard Bormann, Werner Kraus, and Marco F Huber. 2020. A survey on learning-based robotic grasping. Current Robotics Reports (2020), 1–11.Google Scholar
31. Sergey Levine, Peter Pastor, Alex Krizhevsky, Julian Ibarz, and Deirdre Quillen. 2018. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection. The International Journal of Robotics Research 37, 4–5 (2018), 421–436.Google ScholarCross Ref
32. C Karen Liu. 2009. Dextrous manipulation from a grasping pose. ACM Trans. on Graphics (Proc. SIGGRAPH) 28, 3 (2009), 59:1–59:6.Google ScholarDigital Library
33. Min Liu, Zherong Pan, Kai Xu, Kanishka Ganguly, and Dinesh Manocha. 2019. Generating Grasp Poses for A High-DOF Gripper Using Neural Networks. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. 1518–1525.Google ScholarDigital Library
34. Min Liu, Zherong Pan, Kai Xu, Kanishka Ganguly, and Dinesh Manocha. 2020b. Deep Differentiable Grasp Planner for High-DOF Grippers. In Proceedings of the Robotics: Science and Systems 2020.Google ScholarCross Ref
35. Min Liu, Zherong Pan, Kai Xu, and Dinesh Manocha. 2020a. New Formulation of Mixed-Integer Conic Programming for Globally Optimal Grasp Planning. IEEE Robotics and Automation Letters 5, 3 (2020), 4663–4670. Google ScholarCross Ref
36. Qingkai Lu, Kautilya Chenna, Balakumar Sundaralingam, and Tucker Hermans. 2020a. Planning multi-fingered grasps as probabilistic inference in a learned deep network. In Robotics Research. Springer, 455–472.Google Scholar
37. Qingkai Lu, Mark Van der Merwe, Balakumar Sundaralingam, and Tucker Hermans. 2020b. Multifingered Grasp Planning via Inference in Deep Neural Networks: Outperforming Sampling by Learning Differentiable Models. IEEE Robotics & Automation Magazine (2020).Google Scholar
38. Jeffrey Mahler, Jacky Liang, Sherdil Niyaz, Michael Laskey, Richard Doan, Xinyu Liu, Juan Aparicio, and Ken Goldberg. 2017. Dex-Net 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics. In Proceedings of Robotics: Science and Systems. Google ScholarCross Ref
39. Jeffrey Mahler, Matthew Matl, Xinyu Liu, Albert Li, David Gealy, and Ken Goldberg. 2018. Dex-net 3.0: Computing robust vacuum suction grasp targets in point clouds using a new analytic model and deep learning. In 2018 IEEE International Conference on robotics and automation (ICRA). IEEE, 5620–5627.Google ScholarDigital Library
40. Jeffrey Mahler, Florian T Pokorny, Brian Hou, Melrose Roderick, Michael Laskey, Mathieu Aubry, Kai Kohlhoff, Torsten Kröger, James Kuffner, and Ken Goldberg. 2016. Dex-net 1.0: A cloud-based network of 3d objects for robust grasp planning using a multi-armed bandit model with correlated rewards. In 2016 IEEE international conference on robotics and automation (ICRA). IEEE, 1957–1964.Google ScholarDigital Library
41. Alexis Maldonado, Ulrich Klank, and Michael Beetz. 2010. Robotic grasping of un-modeled objects using time-of-flight range data and finger torque information. In International Conference on Intelligent Robots and Systems. IEEE, 2586–2591.Google Scholar
42. Priyanka Mandikal and Kristen Grauman. 2021. Dexterous robotic grasping with object-centric visual affordances. In 2021 IEEE international conference on robotics and automation (ICRA). IEEE.Google ScholarDigital Library
43. Andrew T Miller and Peter K Allen. 2000. Graspit!: A versatile simulator for grasp analysis. In in Proc. of the ASME Dynamic Systems and Control Division. Citeseer.Google ScholarCross Ref
44. Andrew T Miller and Peter K Allen. 2004. Graspit! a versatile simulator for robotic grasping. IEEE Robotics & Automation Magazine 11, 4 (2004), 110–122.Google ScholarCross Ref
45. Volodymyr Mnih, Koray Kavukcuoglu, David Silver, Andrei A Rusu, Joel Veness, Marc G Bellemare, Alex Graves, Martin Riedmiller, Andreas K Fidjeland, Georg Ostrovski, et al. 2015. Human-level control through deep reinforcement learning. nature 518, 7540 (2015), 529–533.Google Scholar
46. Marco Monforte, Fanny Ficuciello, and Bruno Siciliano. 2019. Multifunctional principal component analysis for human-like grasping. In Human Friendly Robotics. Springer, 47–58.Google Scholar
47. Douglas Morrison, Peter Corke, and Jürgen Leitner. 2018. Closing the loop for robotic grasping: A real-time, generative grasp synthesis approach. arXiv preprint arXiv:1804.05172 (2018).Google Scholar
48. Van-Duc Nguyen. 1988. Constructing force-closure grasps. The International Journal of Robotics Research 7, 3 (1988), 3–16.Google ScholarDigital Library
49. Zherong Pan, Duo Zhang, Changhe Tu, and Xifeng Gao. 2022. Planning of Power Grasps Using Infinite Program Under Complementary Constraints. IEEE Robotics and Automation Letters 7, 1 (2022), 650–657.Google ScholarCross Ref
50. Jack Parker-Holder, Aldo Pacchiano, Krzysztof M Choromanski, and Stephen J Roberts. 2020. Effective diversity in population based reinforcement learning. Advances in Neural Information Processing Systems 33 (2020), 18050–18062.Google Scholar
51. Xue Bin Peng, Marcin Andrychowicz, Wojciech Zaremba, and Pieter Abbeel. 2018. Sim-to-real transfer of robotic control with dynamics randomization. In 2018 IEEE international conference on robotics and automation (ICRA). IEEE, 3803–3810.Google ScholarDigital Library
52. Sören Pirk, Vojtech Krs, Kaimo Hu, Suren Deepak Rajasekaran, Hao Kang, Yusuke Yoshiyasu, Bedrich Benes, and Leonidas J Guibas. 2017. Understanding and exploiting object interaction landscapes. ACM Transactions on Graphics 36, 3 (2017), 1–14.Google ScholarDigital Library
53. Nancy S Pollard and Victor Brian Zordan. 2005. Physically based grasping control from example. In Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation. 311–318.Google ScholarDigital Library
54. Charles R Qi, Hao Su, Kaichun Mo, and Leonidas J Guibas. 2017. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proc. IEEE Conf. on Computer Vision & Pattern Recognition. 652–660.Google Scholar
55. Deirdre Quillen, Eric Jang, Ofir Nachum, Chelsea Finn, Julian Ibarz, and Sergey Levine. 2018. Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods. In 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 6284–6291.Google ScholarDigital Library
56. Aravind Rajeswaran, Vikash Kumar, Abhishek Gupta, Giulia Vezzani, John Schulman, Emanuel Todorov, and Sergey Levine. 2017. Learning complex dexterous manipulation with deep reinforcement learning and demonstrations. arXiv preprint arXiv:1709.10087 (2017).Google Scholar
57. Máximo A Roa and Raúl Suárez. 2009. Computation of independent contact regions for grasping 3-d objects. IEEE Transactions on Robotics 25, 4 (2009), 839–850.Google ScholarDigital Library
58. Anis Sahbani, Sahar El-Khoury, and Philippe Bidaud. 2012. An overview of 3D object grasp synthesis algorithms. Robotics and Autonomous Systems 60, 3 (2012), 326–336.Google ScholarDigital Library
59. Ashutosh Saxena, Justin Driemeyer, Justin Kearns, and Andrew Y Ng. 2007. Robotic grasping of novel objects. In Advances in neural information processing systems. 1209–1216.Google Scholar
60. Ashutosh Saxena, Lawson Wong, Morgan Quigley, and Andrew Y Ng. 2010. A vision-based system for grasping novel objects in cluttered environments. In Robotics research. Springer, 337–348.Google Scholar
61. Arjun Singh, James Sha, Karthik S Narayan, Tudor Achim, and Pieter Abbeel. 2014. Bigbird: A large-scale 3d database of object instances. In 2014 IEEE international conference on robotics and automation (ICRA). IEEE, 509–516.Google ScholarCross Ref
62. Shuran Song, Andy Zeng, Johnny Lee, and Thomas Funkhouser. 2020. Grasping in the wild: Learning 6dof closed-loop grasping from low-cost demonstrations. IEEE Robotics and Automation Letters 5, 3 (2020), 4978–4985.Google ScholarCross Ref
63. Sebastian Starke, He Zhang, Taku Komura, and Jun Saito. 2019. Neural state machine for character-scene interactions. ACM Trans. Graph. 38, 6 (2019), 209–1.Google ScholarDigital Library
64. Ioan A Sucan, Mark Moll, and Lydia E Kavraki. 2012. The open motion planning library. IEEE Robotics & Automation Magazine 19, 4 (2012), 72–82.Google ScholarCross Ref
65. Richard S Sutton and Andrew G Barto. 2018. Reinforcement learning: An introduction. MIT press.Google ScholarDigital Library
66. Hugues Thomas, Charles R Qi, Jean-Emmanuel Deschaud, Beatriz Marcotegui, François Goulette, and Leonidas J Guibas. 2019. Kpconv: Flexible and deformable convolution for point clouds. In Proceedings of the IEEE/CVF international conference on computer vision. 6411–6420.Google ScholarCross Ref
67. Mark Van der Merwe, Qingkai Lu, Balakumar Sundaralingam, Martin Matak, and Tucker Hermans. 2019. Learning Continuous 3D Reconstructions for Geometrically Aware Grasping. arXiv preprint arXiv:1910.00983 (2019).Google Scholar
68. Jacob Varley, Chad DeChant, Adam Richardson, Joaquín Ruales, and Peter Allen. 2017. Shape completion enabled robotic grasping. In 2017 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2442–2447.Google ScholarDigital Library
69. Mel Vecerik, Todd Hester, Jonathan Scholz, Fumin Wang, Olivier Pietquin, Bilal Piot, Nicolas Heess, Thomas Rothörl, Thomas Lampe, and Martin Riedmiller. 2017. Leveraging demonstrations for deep reinforcement learning on robotics problems with sparse rewards. arXiv preprint arXiv:1707.08817 (2017).Google Scholar
70. Ulrich Viereck, Andreas Pas, Kate Saenko, and Robert Platt. 2017. Learning a visuo-motor controller for real world robotic grasping using simulated depth images. In Conference on Robot Learning. PMLR, 291–300.Google Scholar
71. Nick Walker, Christoforos Mavrogiannis, Siddhartha Srinivasa, and Maya Cakmak. 2022. Influencing Behavioral Attributions to Robot Motion During Task Execution. In Conference on Robot Learning. PMLR, 169–179.Google Scholar
72. Lirui Wang, Yu Xiang, and Dieter Fox. 2019. Manipulation trajectory optimization with online grasp synthesis and selection. arXiv preprint arXiv:1911.10280 (2019).Google Scholar
73. Walter Wohlkinger, Aitor Aldoma, Radu B Rusu, and Markus Vincze. 2012. 3dnet: Large-scale object class recognition from cad models. In 2012 IEEE international conference on robotics and automation. IEEE, 5384–5391.Google ScholarCross Ref
74. Wenxuan Wu, Zhongang Qi, and Li Fuxin. 2019. Pointconv: Deep convolutional networks on 3d point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 9621–9630.Google ScholarCross Ref
75. Zhenjia Xu, Beichun Qi, Shubham Agrawal, and Shuran Song. 2021. Adagrasp: Learning an adaptive gripper-aware grasping policy. In 2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 4620–4626.Google ScholarDigital Library
76. Xi Zhao, Myung Geol Choi, and Taku Komura. 2017. Character-object interaction retrieval using the interaction bisector surface. Computer Graphics Forum (Proc. Eurographics) 36, 2 (2017), 119–129.Google ScholarDigital Library
77. Xi Zhao, He Wang, and Taku Komura. 2014. Indexing 3d scenes using the interaction bisector surface. ACM Trans. on Graphics 33, 3 (2014), 1–14.Google ScholarDigital Library