
“Integrated Shape Model from Multiview Range Images” by Masuda
Conference:
Type(s):
Title:
- Integrated Shape Model from Multiview Range Images
Presenter(s)/Author(s):
Entry Number:
- 052
Abstract:
To obtain a shape model from partial 3-D shapes measured from multiple directions, it is necessary to solve three problems: 1) matching, 2) registration and 3) integration. Traditionally, these problems have been solved separately, and applied sequentially in this order because of the dependencies among these problems. This is possible if it is assumed that mismatches like false measurements or wrong correspondences can be detected beforehand, but practically, this is not always possible due to complex sensor characteristics. Consequently, the data need to be registered in advance to detect mismatches automatically by comparing multiple views, which arises another dependency.
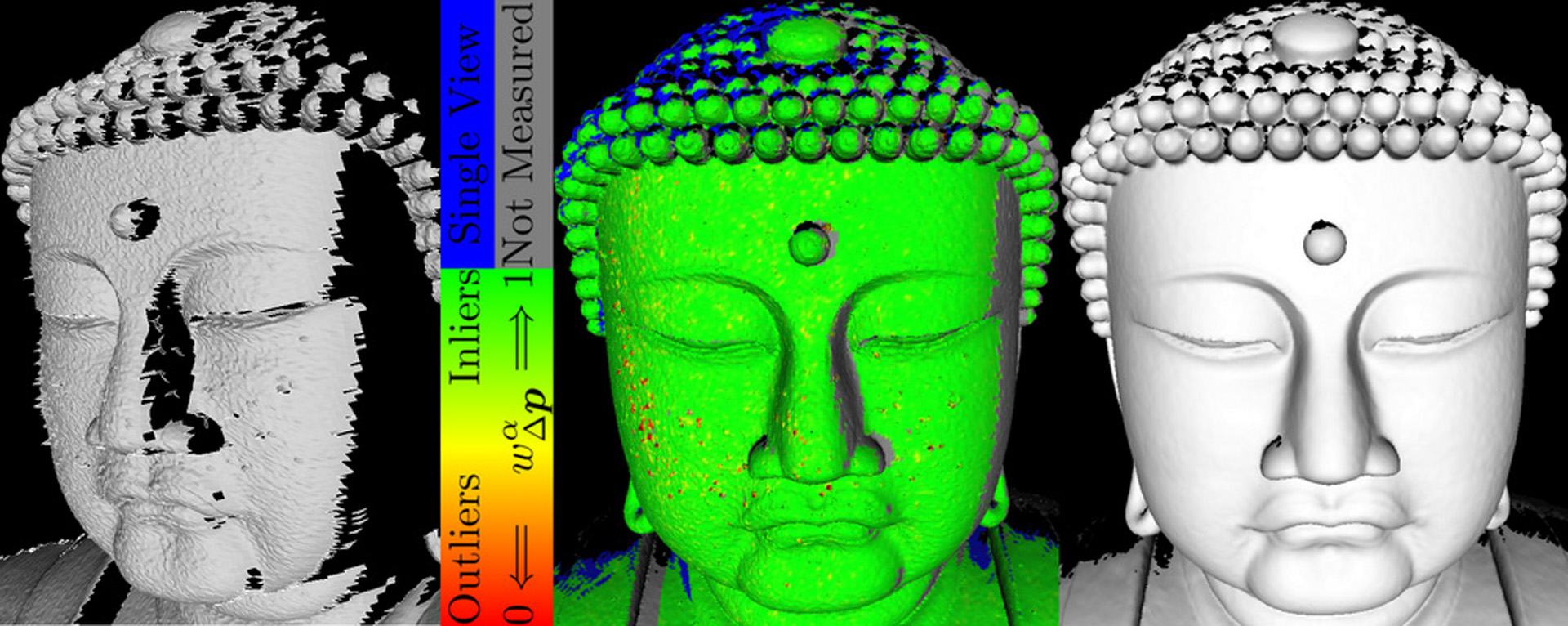
We proposed a unified framework within which these problems can be solved together[Masuda 2003]. In this framework, object shape is represented by the signed distance field (SDF). We represent an SDF sample by a set of signed distance, closest point and surface normal from a 3-D sampling point to the object surface. The input range images are assumed to be roughly registered in advance. They are integrated by a robust estimator that detects mismatches as outliers as well, and then input images are registered to the integrated shape. These two complementary processes are alternately iterated until no additional registration is necessary. Because each input image is registered to the integrated shape, there is no accumulation of alignment error like pairwise registration methods. From the integrated SDF, we can easily reconstruct the object surface attached with surface normals that enables smooth rendering (cf. hyp3.mpg for overview of the algorithm).
References:
1. http://www.cyra.com/.
2. Masuda, T. 2003. Registration and integration of multiple range images by matching signed distance fields for object shape modeling. Computer Vision and Image Understanding 87, 51–65.