
“Fast and Accurate Distance, Penetration, and Collision Queries Using Point-Sphere Trees and Distance Fields” by Sagardia and Hulin
Conference:
Type(s):
Title:
- Fast and Accurate Distance, Penetration, and Collision Queries Using Point-Sphere Trees and Distance Fields
Presenter(s)/Author(s):
Entry Number:
- 43
Abstract:
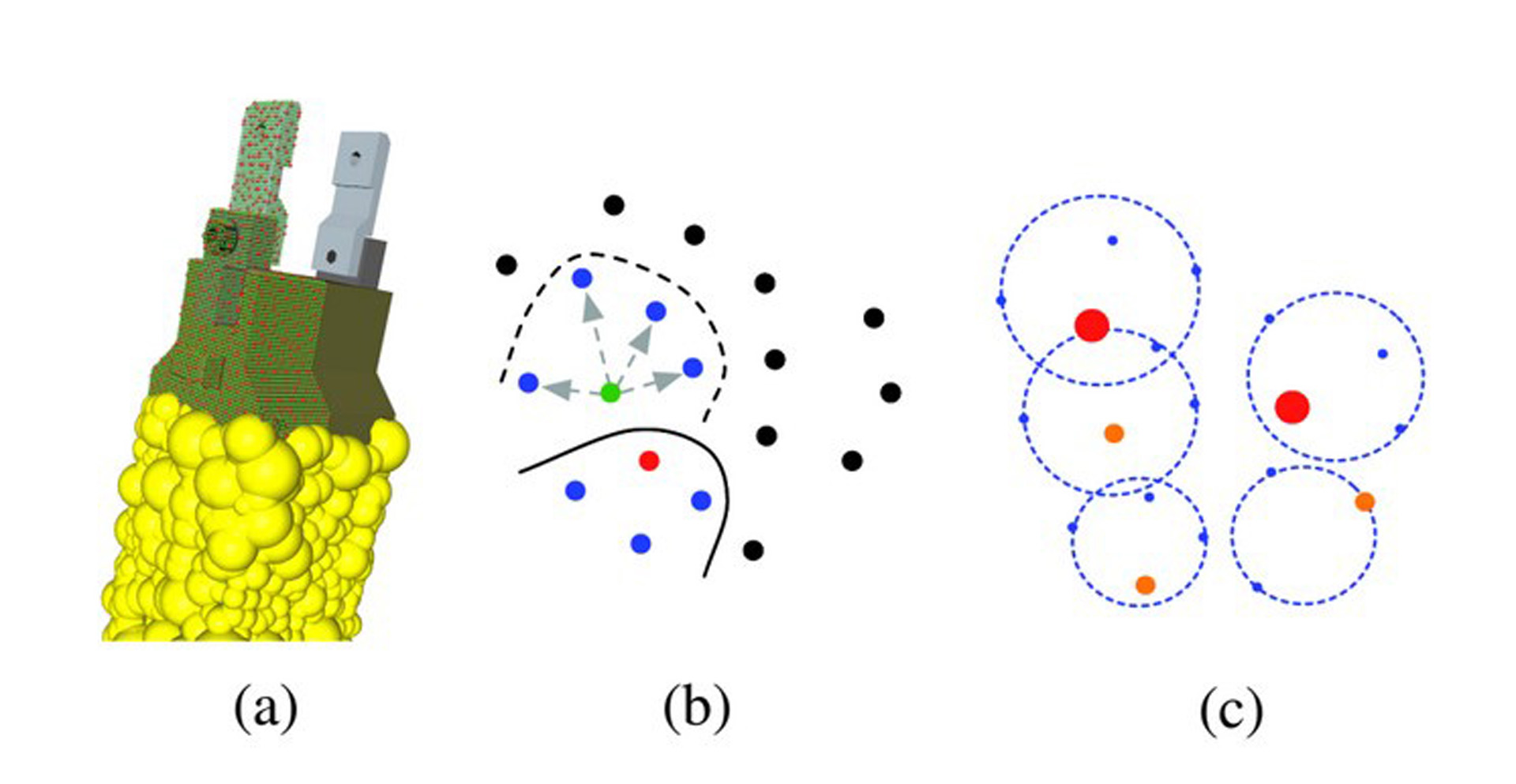
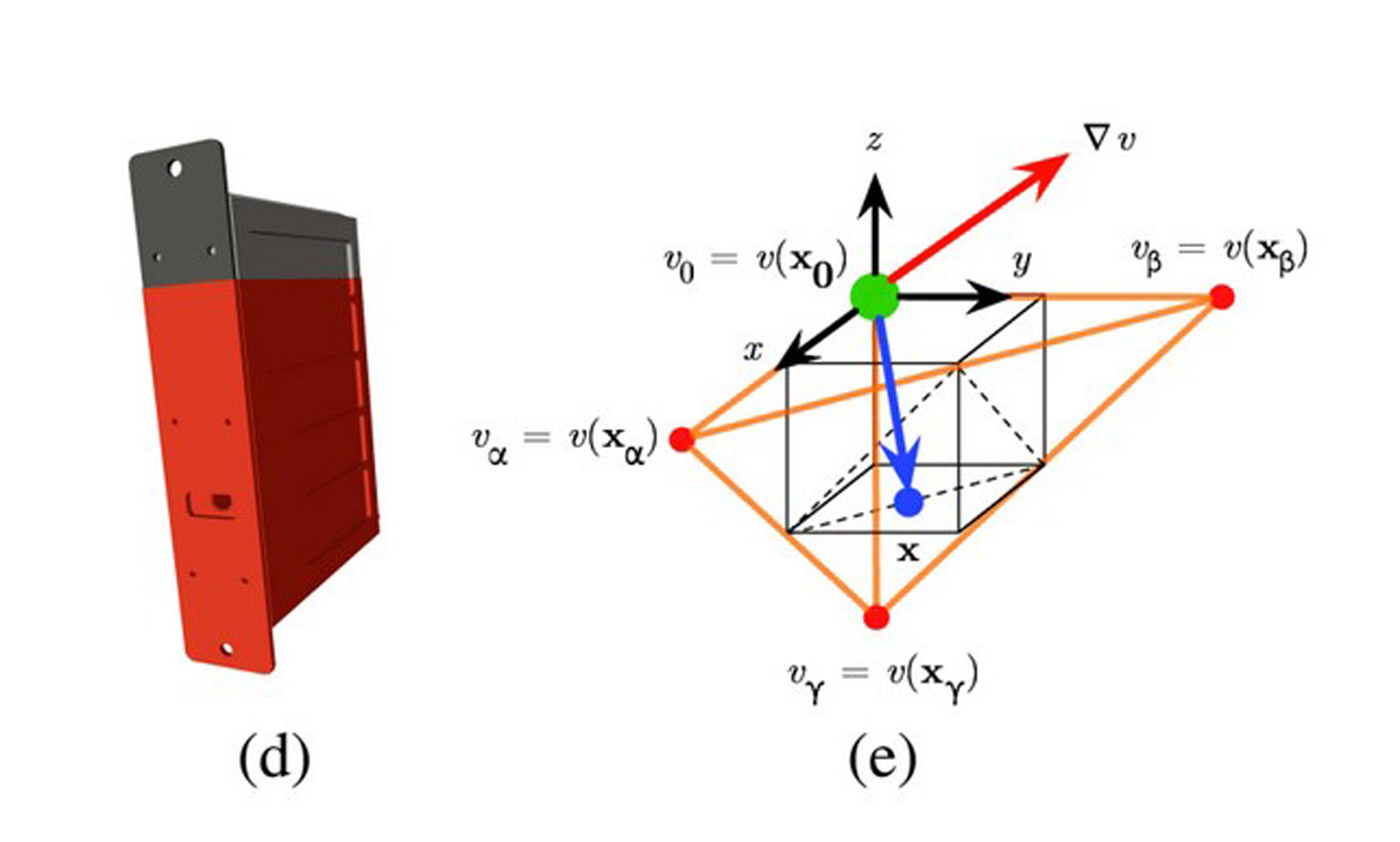
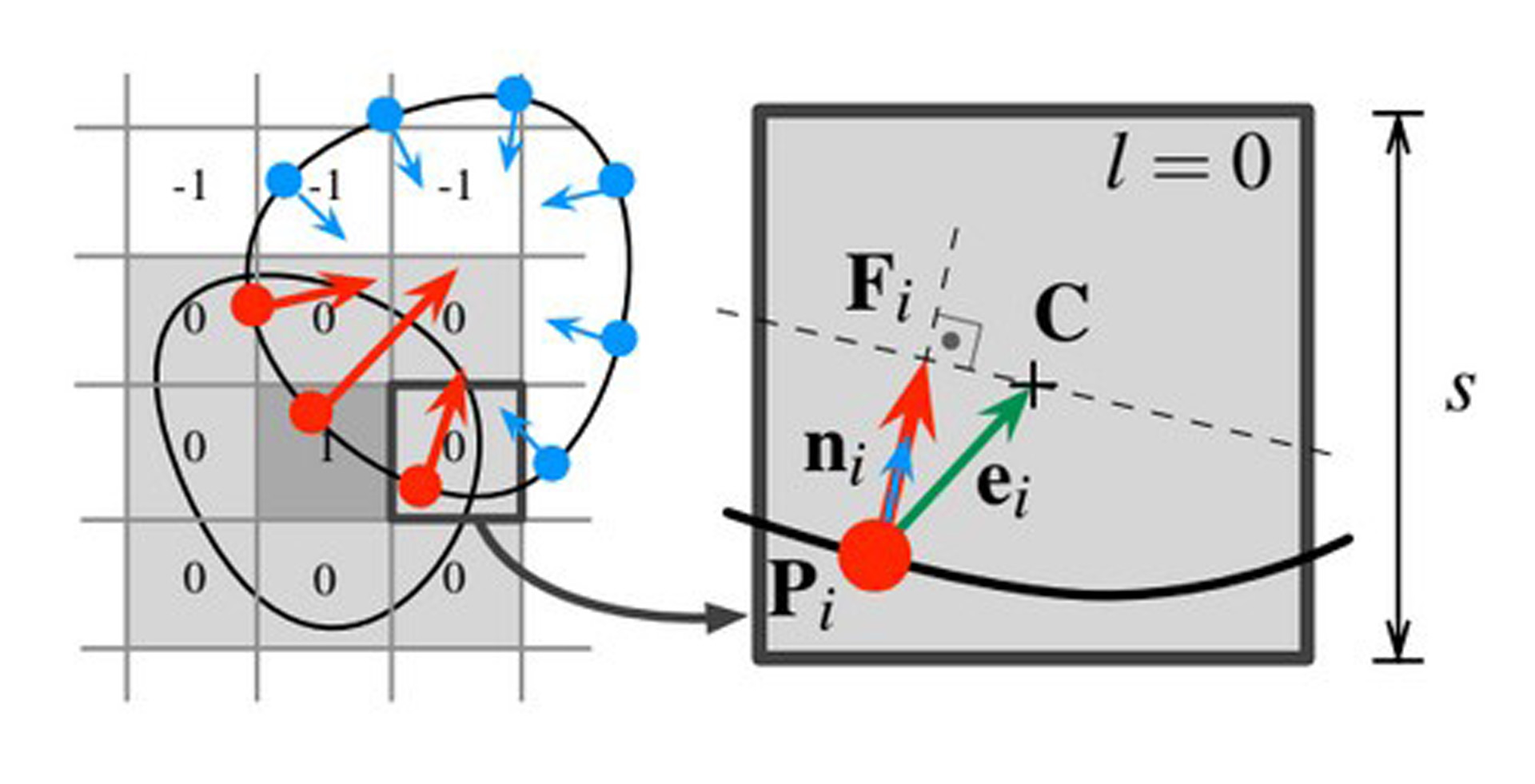
Collision detection, force computation, and proximity queries are fundamental in interactive gaming, assembly simulations, or virtual prototyping. However, many available methods have to find a trade-off between the accuracy and the high computational speed required by haptics (1 kHz). [McNeely et al. 2006] presented the Voxmap-Pointshell (VPS) Algorithm, which enabled more reliable six-DoF haptic rendering between complex geometries than other approaches based on polygonal data structures. For each colliding object pair, this approach uses (i) a voxelmap or voxelized representation of one object and (ii) a pointshell or point-sampled representation of the other object (see Figure 2). In each cycle, the penetration of the points in the voxelized object is computed, which yields the collision force. [Barbič and James 2008] extended the VPS Algorithm to support deformable objects. This approach builds hierarchical data structures and distance fields that are updated during simulation as the objects deform.
References:
1. Barbič, J., and James, D. 2008. Six-dof haptic rendering of contact between geometrically complex reduced deformable models. Haptics, IEEE Transactions on 1, 1 (jan.-june), 39–52.
2. McNeely, W. A., Puterbaugh, K. D., and Troy, J. J. 2006. Voxel-based 6-dof haptic rendering improvements. Haptics-e: The Electronic Journal of Haptics Research 3.
3. Sagardia, M., Hulin, T., Preusche, C., and Hirzinger, G. 2008. Improvements of the voxmap-pointshell algorithm – fast generation of haptic data-structures. In 53. IWK – TU Ilmenau.