
“Continuum crowds” by Treuille, Cooper and Popovic
Conference:
Type(s):
Title:
- Continuum crowds
Presenter(s)/Author(s):
Abstract:
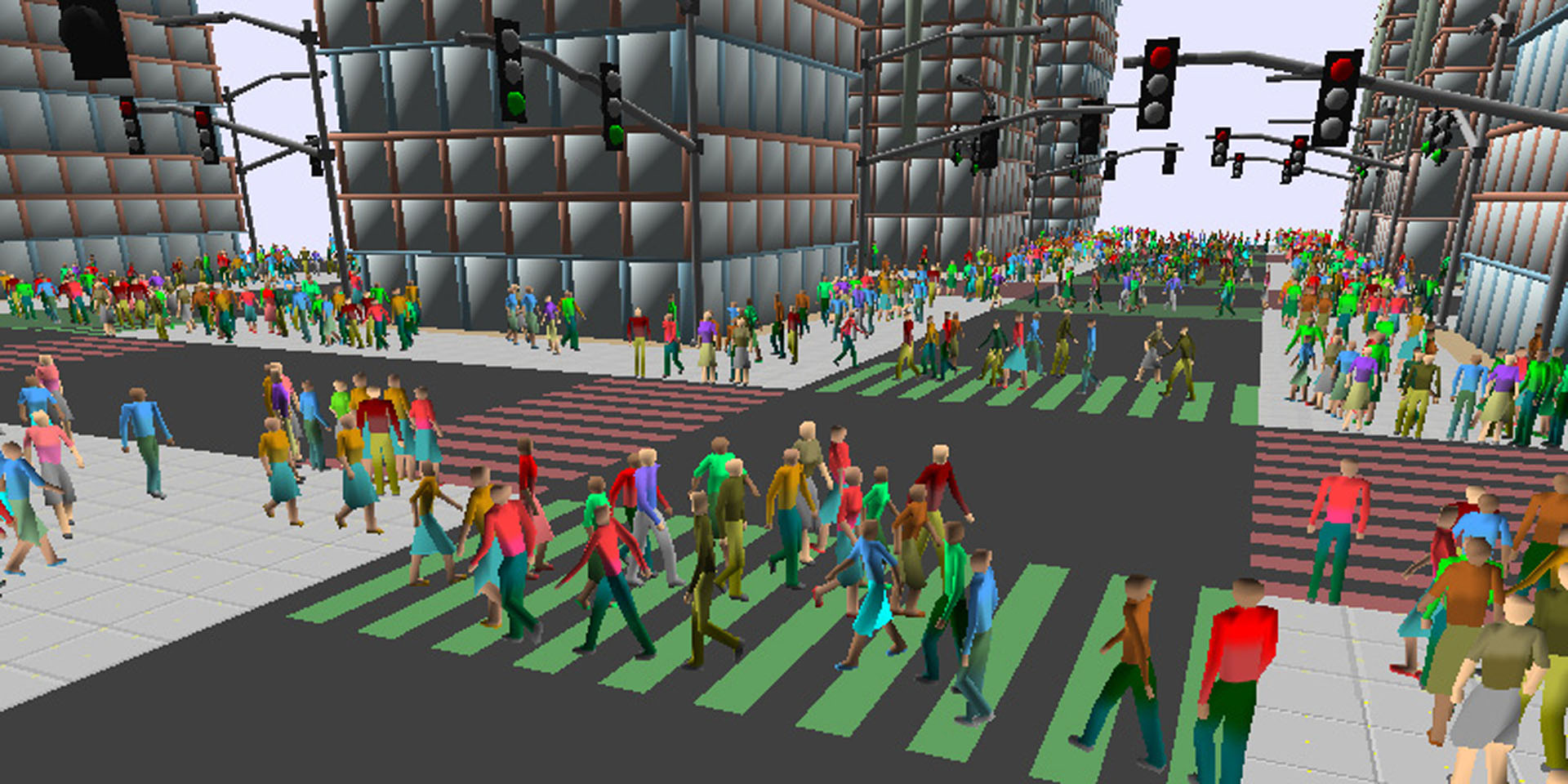
We present a real-time crowd model based on continuum dynamics. In our model, a dynamic potential field simultaneously integrates global navigation with moving obstacles such as other people, efficiently solving for the motion of large crowds without the need for explicit collision avoidance. Simulations created with our system run at interactive rates, demonstrate smooth flow under a variety of conditions, and naturally exhibit emergent phenomena that have been observed in real crowds.
References:
1. Arkin, R. 1987. In 1987 IEEE International Conference on Robotics and Automation., vol. 4, 264–271.Google Scholar
2. Bayazit, O. B., Lien, J.-M., and Amato, N. M. 2002. Better group behaviors in complex environments with global roadmaps. In Int. Conf. on the Sim. and Syn. of Living Sys. (Alife), 362–370. Google ScholarDigital Library
3. Bennewitz, M., and Burgard, W. 2001. Finding solvable priority schemes for decoupled path planning techniquesfor teams of mobile robots. Proceedings of the 9th International Symposium on Intelligent Robotic Systems (SIRS).Google Scholar
4. Brogan, D. C., and Hodgins, J. K. 1997. Group behaviors for systems with significant dynamics. In Autonomous Robots, 137–153. Google ScholarDigital Library
5. Chenney, S. 2004. Flow tiles. In 2004 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, 233–242. Google ScholarDigital Library
6. Clements, R. R., and Hughes, R. L. 2004. Mathematical modelling of a mediaeval battle: the battle of Agincourt, 1415. Math. Comput. Simul. 64, 2, 259–269. Google ScholarDigital Library
7. Colombo, R. M., and Rosini, M. D. 2005. Pedestrian flows and nonclassical shocks. Mathematical Methods in the Applied Sciences 28, 13.Google ScholarCross Ref
8. Cordeiro, O. C., Braun, A., Silveira, C. B., Musse, S. R., and Cavalheiro, G. G. H. 2005. Concurrency on social forces simulation model. First International Workshop on Crowd Simulation.Google Scholar
9. Fedkiw, R., Stam, J., and Jensen, H. 2001. Visual Simulation of Smoke. In Computer Graphics (SIGGRAPH 2001), ACM, 15–22. Google ScholarDigital Library
10. Feurtey, F. 2000. Dept. of EE. Master’s thesis, univ. of Tokyo.Google Scholar
11. Funge, J., Tu, X., and Terzopoulos, D. 1999. Cognitive modeling: Knowledge, reasoning and planning for intelligent characters. In Proceedings of SIGGRAPH 99, Computer Graphics Proceedings, Annual Conference Series, 29–38. Google ScholarDigital Library
12. Goldenstein, S., Karavelas, M., Metaxas, D., Guibas, L., Aaron, E., and Goswami, A. 2001. Scalable nonlinear dynamical systems for agent steering and crowd simulation. Computers & Graphics 25, 6 (Dec.), 983–998.Google ScholarCross Ref
13. Heïgeas, L., Luciani, A., Thollot, J., and Castagné, N. 2003. A physically-based particle model of emergent crowd behaviors. In GraphiCon.Google Scholar
14. Helbing, D., Molnár, P., and Schweitzer, F. 1994. Computer simulations of pedestrian dynamics and trail formation. In Evolution of Natural Structures, 229–234.Google Scholar
15. Helbing, D., Molnár, P., Farkas, I. J., and Bolay, K. 2001. Self-organizing pedestrian movement. Environment and Planning B: Planning and Design 28, 361–383.Google ScholarCross Ref
16. Helbing, D., Buzna, L., and Werner, T. 2003. Self-organized pedestrian crowd dynamics and design solutions. Traffic Forum 12.Google Scholar
17. Hongwan, L., Wai, F. K., and Chor, C. H. 2003. A study of pedestrian flow using fluid dynamics. Tech. rep.Google Scholar
18. Hughes, R. L. 2002. A continuum theory for the flow of pedestrians. Transportation Research Part B 36, 6 (july), 507535.Google ScholarCross Ref
19. Hughes, R. L. 2003. The flow of human crowds. Annu. Rev. Fluid Mech. 35, 169–182.Google ScholarCross Ref
20. Kamphuis, A., and Overmars, M. H. 2004. Finding paths for coherent groups using clearance. In 2004 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, 19–28. Google ScholarDigital Library
21. Ketchell, N. 2002. A technical summary of the aea egress code. Tech. Rep. 1, AEA Technology.Google Scholar
22. Kimmel, R., and Sethian, J. A. 2001. Optimal Algorithms for Shape from Shading and Path Planning. Journal of Mathematical Imaging and Vision 14, 237–244. Google ScholarDigital Library
23. Kirchner, A., and Schadschneider, A. 2002. Simulation of evacuation processes using a bionics-inspired cellular automaton model for pedestrian dynamics. In Physica A, vol. 312, 260–276.Google ScholarCross Ref
24. Lamarche, F., and Donikian, S. 2004. Crowd of virtual humans: a new approach for real time navigation in complex and structured environments. Computer Graphics Forum 23, 3 (Sept.), 509–518.Google ScholarCross Ref
25. Li, T.-T., and Chou, H.-C. 2003. Motion planning for a crowd of robots. In IEEE International Conference on Robotics and Automation.Google Scholar
26. Li, T.-Y., Leng, Y.-J., and Chang, S.-I. 2001. Simulating virtual crowds with a leader-follower model. In Proceedings of 2001 Computer Animation Conference.Google Scholar
27. Loscos, C., Marchal, D., and Meyer, A. 2003. Intuitive crowd behaviour in dense urban environments using local laws. In Theory and Practice of Computer Graphics (TPCG’03). Google ScholarDigital Library
28. Massive Software, 2006. http://www.massivesoftware.com.Google Scholar
29. Metoyer, R. A., and Hodgins, J. K. 2004. Reactive pedestrian path following from examples. The Visual Computer 20, 10, 635–649.Google ScholarDigital Library
30. Musse, S. R., and Thalmann, D. 1997. A model of human crowd behavior: Group inter-relationship and collision detection analysis. In Computer Animation and Simulation ’97, 39–51.Google Scholar
31. Musse, S. R., Babski, C., Capin, T., and Thalmann, D. 1998. Crowd modelling in collaborative virtual environments. In Proceedings of the ACM symposium on Virtual reality software and technology, 115–123. Google ScholarDigital Library
32. OpenSteer, 2006. http://opensteer.sourceforge.net.Google Scholar
33. Parker, L. E. 1993. Designing control laws for cooperative agent teams. In IEEE International Conference on Robotics and Automation, 582–587.Google ScholarCross Ref
34. Pelechano, N., OBrien, K., Silverman, B., and Badler, N. 2005. Crowd simulation incorporating agent psychological models, roles and communication. First International Workshop on Crowd Simulation.Google Scholar
35. Pettré, J., Laumond, J.-P., and Thalmann, D. 2005. A navigation graph for real-time crowd animation on multilayered and uneven terrain. First International Workshop on Crowd Simulation.Google Scholar
36. Reynolds, C. W. 1987. Flocks, herds, and schools: A distributed behavioral model. In Computer Graphics (Proceedings of SIGGRAPH 87), vol. 21, 25–34. Google ScholarDigital Library
37. Reynolds, C., 1999. Steering behaviors for autonomous characters.Google Scholar
38. Shao, W., and Terzopoulos, D. 2005. Autonomous pedestrians. In SCA ’05: Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation, ACM Press, New York, NY, USA, 19–28. Google ScholarDigital Library
39. Still, G. 2000. Crowd Dynamics. PhD thesis, University of Warwik, UK.Google Scholar
40. Sung, M., Gleicher, M., and Chenney, S. 2004. Scalable behaviors for crowd simulation. Computer Graphics Forum 23, 3 (Sept.), 519–528.Google ScholarCross Ref
41. Sung, M., Kovar, L., and Gleicher, M. 2005. Fast and accurate goal-directed motion synthesis for crowds. In SCA ’05: Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation, ACM Press, New York, NY, USA, 291–300. Google ScholarDigital Library
42. Tsai, R., Zhao, H., and Osher, S. 2005. Fast sweeping algorithms for a class of hamilton-jacobi equations. SIAM Journal of Numerical Analysis 42, 6.Google Scholar
43. Tsitsiklis, J. N. 1995. Efficient algorithms for globally optimal trajectories. IEEE Transactions on Automatic Control 40, 9 (Sept.), 1528–1538.Google ScholarCross Ref
44. Tu, X., and Terzopoulos, D. 1994. Artificial fishes: Physics, locomotion, perception, behavior. In Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, 43–50. Google ScholarDigital Library