
“Computing camera orientation relative to a world coordinate frame by detecting its projected axes” by Lieberei, Ruwwe, Keck, Rusch and Zolzer
Conference:
Type(s):
Title:
- Computing camera orientation relative to a world coordinate frame by detecting its projected axes
Presenter(s)/Author(s):
Abstract:
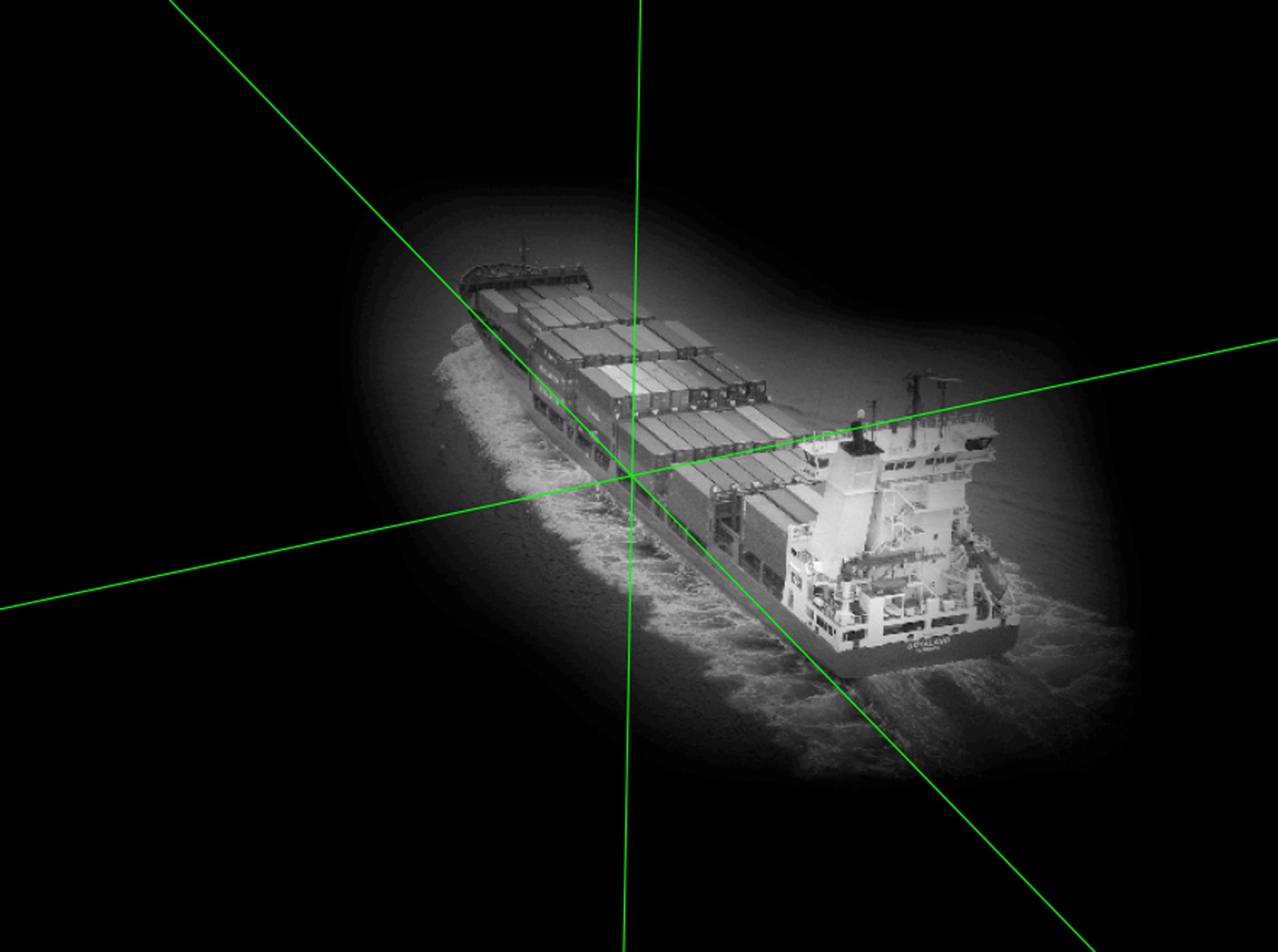
In this paper a new approach is presented to compute the camera orientation relative to some man-made objects coordinate frame, the world coordinate frame. The approach is based on the observation, that man-made structures expose many lines, which are aligned with three principal orthogonal directions, belonging to a cartesian world coordinate frame. Modeling the camera as an orthographic one, a nonlinear equation system is derived, which solutions yield three angles, that describe the camera orientation relative to the scene. In order to detect the projected principal axes of the world coordinate frame, an analysis of the log-magnitude spectrum of an image is used, followed by an algorithm that uses line information from the input image directly. The algorithm has been tested on a variety of rendered test images and real images of ships.
References:
1. Coughlan, J. M., and Yuille, A. L. 2000. The manhattan world assumption: Regularities in scene statistics which enable bayesian inference. NIPS, 845–851.
2. Dempster, A., Laird, N., and Rubin, D. 1977. Maximum likelihood from incomplete data via the em algorithm. Journal of the Royal Statistical Society 39, 1, 1–38.
3. Greig, D., Porteous, B., and Seheult, A. 1989. Exact maximum a posteriori estimation for binary images. Journal of the Royal Statistical Society 51, 2, 271–279.
4. Kosecka, J., and Zhang, W. 2002. Video compass. Proceedings of the 7th European Conference on Computer Vision-Part IV, 476–490.
5. P. D. Kovesi. Matlab and octave functions for computer vision and image processing. school of computer science & software engineering.
6. Quan, L., and Mohr, R. 1989. Determining perspective structures using hierarchical hough transform. Pattern Recognition Letters 9, 279–286.
7. Rother, C. 2000. A new approach for vanishing point detection in architectural environments. Proceedings of the 11th British Machine Vision Conference (BMVC’00), 382–391.
8. Rusch, O., Ruwwe, C., and Zoelzer, U. 2005. Image segmentation in naval ship images. 11. Workshop Farbbildverarbeitung, 63–70.
9. Tuytelaars, T., Proesmans, M., and Gool, L. V. 1998. The cascaded hough transform. ICIP Proceedings, 736–739.