
“CoDAC: compressive depth acquisition using a single time-resolved sensor” by Colaco, Kirmani, Wong and Goyal
Conference:
Type(s):
Title:
- CoDAC: compressive depth acquisition using a single time-resolved sensor
Presenter(s)/Author(s):
Abstract:
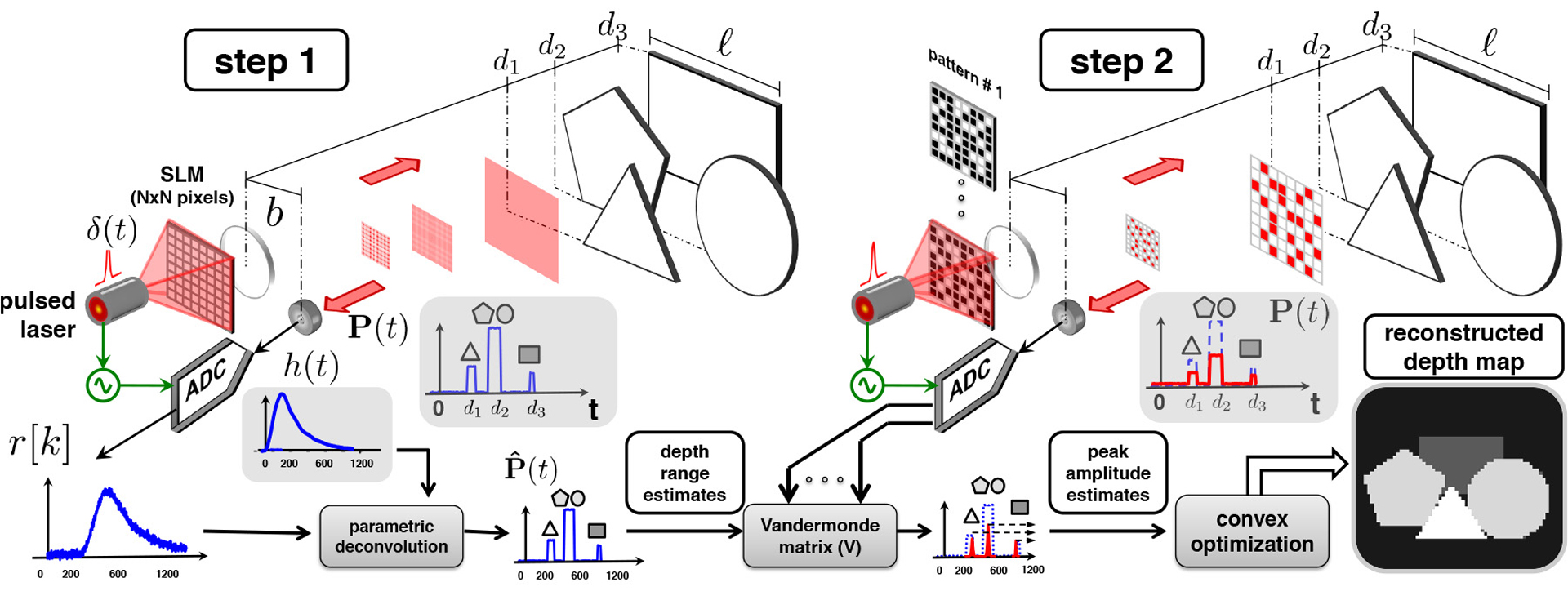
CoDAC is a method for compressive acquisition of scene depth with high spatial and range resolution using a single, omnidirectional, time-resolved photodetector and no scanning components [Kirmani et al.]. Light detection and ranging (LIDAR) systems use time of flight (TOF) in combination with raster scanning of the scene to form depth maps, and TOF cameras instead make TOF measurements in parallel by using an array of sensors. Moreover, existing depth sensing technologies do not use the high compressibility of scene depth to reduce acquisition costs. Here, we present a framework for compressive depth map acquisition using neither raster scanning by the illumination source nor an array of sensors.
References:
1. Kirmani, A., Colaço, A., Wong, F., and Goyal, V. Exploiting sparsity in time-of-flight range acquisition using a single time-resolved sensor. OSA Opt. Express (Oct 2011).