
“C-Space Tunnel Discovery for Puzzle Path Planning” by Zhang, Belfer, Kry and Vouga
Conference:
Type(s):
Title:
- C-Space Tunnel Discovery for Puzzle Path Planning
Session/Category Title: Crowds, Paths, and Puzzles
Presenter(s)/Author(s):
Abstract:
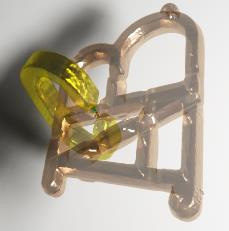
Rigid body disentanglement puzzles are challenging for both humans and motion planning algorithms because their solutions involve tricky twisting and sliding moves that correspond to navigating through narrow tunnels in the puzzle’s configuration space (C-space). We propose a tunnel-discovery and planning strategy for solving these puzzles. First, we locate important features on the pieces using geometric heuristics and machine learning, and then match pairs of these features to discover collision free states in the puzzle’s C-space that lie within the narrow tunnels. Second, we propose a Rapidly-exploring Dense Tree (RDT) motion planner variant that builds tunnel escape roadmaps and then connects these roadmaps into a solution path connecting start and goal states. We evaluate our approach on a variety of challenging disentanglement puzzles and provide extensive baseline comparisons with other motion planning techniques.