
“Analytical methods for dynamic simulation of non-penetrating rigid bodies” by Baraff
Conference:
Type(s):
Title:
- Analytical methods for dynamic simulation of non-penetrating rigid bodies
Presenter(s)/Author(s):
Abstract:
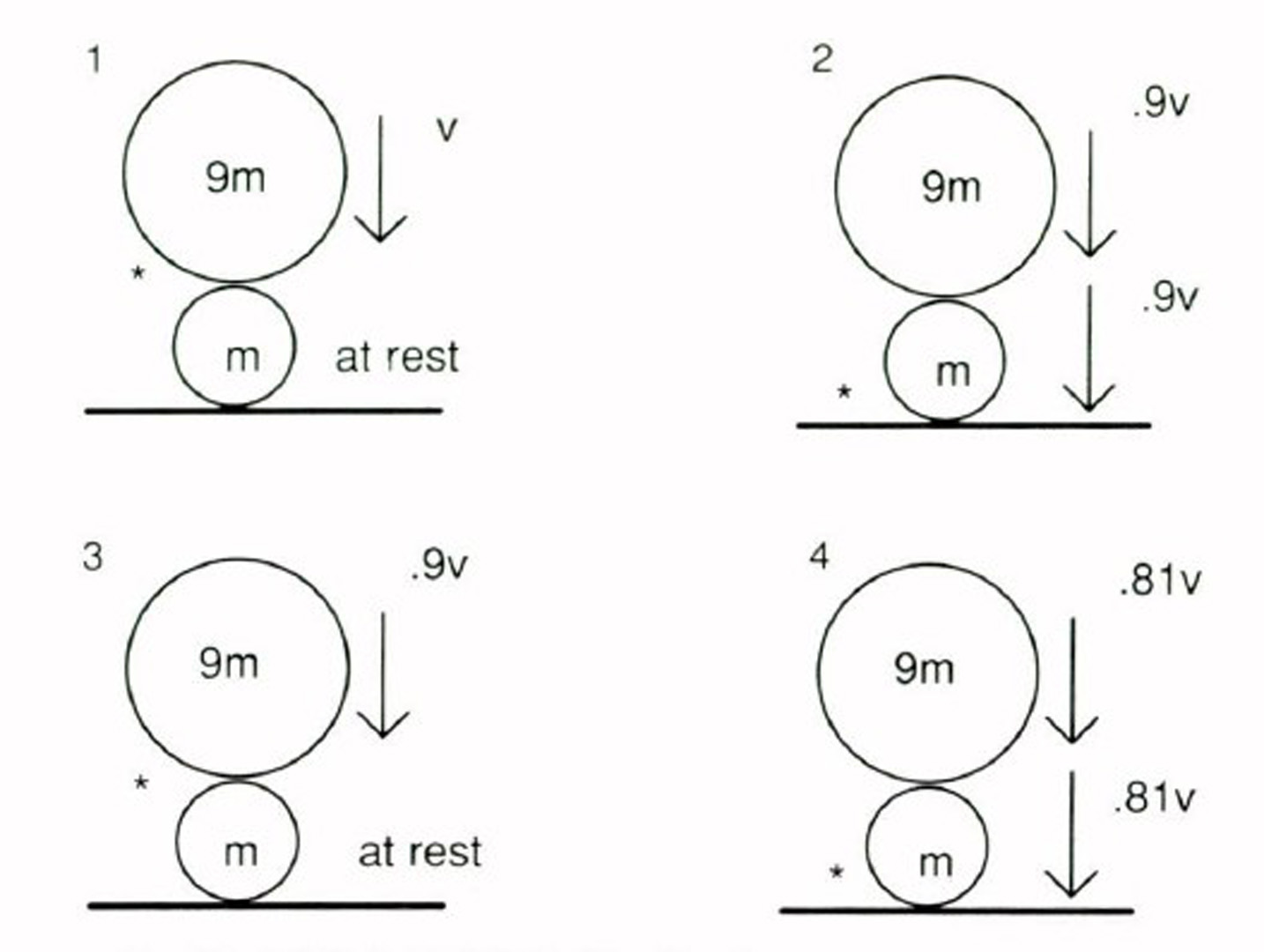
A method for analytically calculating the forces between systems of rigid bodies in resting (non-colliding) contact is presented. The systems of bodies may either be in motion or static equilibrium and adjacent bodies may touch at multiple points. The analytic formulation of the forces between bodies in non-colliding contact can be modified to deal with colliding bodies. Accordingly, an improved method for analytically calculating the forces between systems of rigid bodies in colliding contact is also presented. Both methods can be applied to systems with arbitrary holonomic geometric constraints, such as linked figures. The analytical formulations used treat both holonomic and non-holonomic constraints in a consistent manner.
References:
1. Barzel, R. and Barr, A.H., “Dynamic constraints,” Topics in Pto’sically Based Modeling, course notes, vol. 16, SIG- GRAPH, 1987.
2. Barzel, R. and Barr, A.H., “A modeling system based on dynamic constraints,” Conlputep Graphics (Proc. SIG- GRAPH), vol. 22, pp. 179-188, 1988.
3. Garey, M.R. and Johnson, D.S., Comlmters and Intractability. Freeman, New York, 1979.
4. Gere, J.M. and Timoshenko, S.P., Me~’hani~’s of Materials. Wadsworth, Belmont, California, 1984.
5. Goldstein, H., Classical Mechanics, Addison-Wesley, Reading, Massachusets, 1983.
6. Golub, G. and Van Loan, C., Matrix Computations, John Hopkins University Press, Baltimore, 1983.
7. Hahn, J.K., “Realistic animation of rigid bodies,” Computer Graphics (Pro(‘. SIGGRAPH), vol. 22, pp. 299-308, 1988.
8. Isaacs, P.M. and Cohen, M.F., ‘~Controlling dynamic simulation with kinematic constraints,” Comp,ter Graphits (Pro~’. SIGGRAPH), vol. 21, pp. 2t5-224, 1987.
9. Kozlov, M.K., Tarasov, S.P., and Hacijan, L.G., “‘Polynomial solvability of convex quadratic programming.” Soviet Mathematics Doklady, vol. 20, no. 5, pp. 1108-1111, 1979.
10. Llewellyn, R.W., Linear Programming, Holt, Rinehart and Winston, 1964.
11. MacMillan, W.D., Dynamics of Rigid Bodies, Dover, New York, 1960.
12. Marsten, R.E., “The design of the XMP linear programming library,” ACM Transa~’tions on Mathematical Sofiw’are, vol. 7, no. 4, pp. 481-497, 198t.
13. Moore, M. and Wilhelms, J., “Collision detection and response for computer animation,” Computer Graphics (Pro~’. SIGGRAPH), vol. 22, pp. 289-298, 1988.
14. Murty, K.G., Linear Complementarity, Linear and Nonlinear Pro framming, Heldermann Verlag, Berlin, 1988.
15. Palmer, R.S., Computational Complexio’ of Motion and Stability of Polygons, PhD Diss., Cornell University, January 1987.
16. Platt, J.C. and Barr, A.H., “Constraint methods for flexible models,” Computer Graphics (Proc. SIGGRAPH), vol. 22, pp. 279-288, 1988.
17. Shampine, L.F. and Gordon, M.K., Computer Solution of Ordinary Differential Equations: The Initial Value Problem, Freeman, 1975.
18. Terzopoulos, D., Platt, J.C., and Barr, A.H., “‘Elastically deformable models,” Computer Graphics (Proc. SIG- GRAPH), vol. 21, pp. 205-214, 1987.