
“A general construction scheme for unit quaternion curves with simple high order derivatives” by Kim, Kim and Shin
Conference:
Type(s):
Title:
- A general construction scheme for unit quaternion curves with simple high order derivatives
Presenter(s)/Author(s):
Abstract:
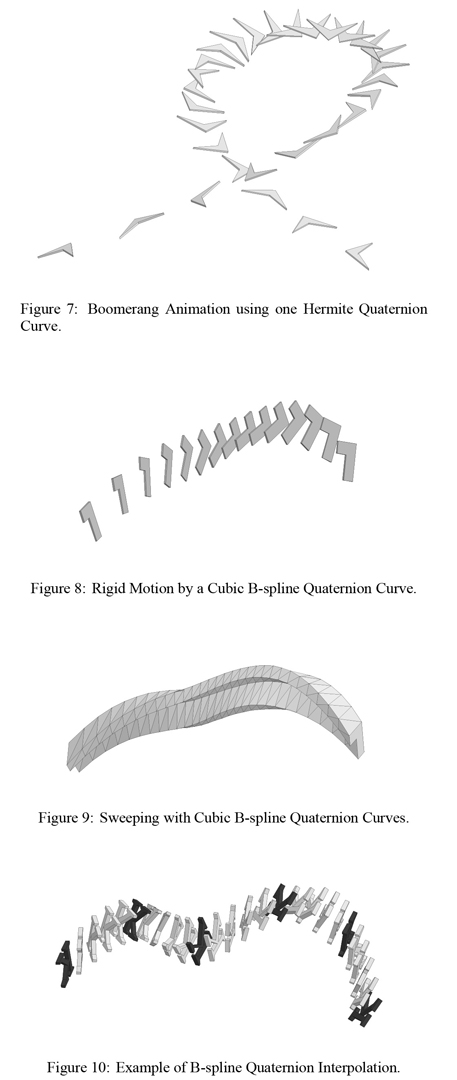
This paper proposes a new class of unit quaternion curves in SO(3). A general method is developed that transforms a curve in R3 (defined as a weighted sum of basis functions) into its unit quaternion analogue in SO(3). Applying the method to well-known spline curves (such as Bezier, Hermite, and B-spline curves), we are able to construct various unit quaternion curves which share many important differential properties with their original curves. Many of our naive common beliefs in geometry break down even in the simple non-Euclidean space S3 or SO(3). For example, the de Casteljau type construction of cubic B-spline quaternion curves does not preserve C2-continuity [10]. Through the use of decomposition into simple primitive quaternion curves, our quaternion curves preserve most of the the algebraic and differential properties of the original spline curves.
References:
1. BARe, A., CURRIN, B., GABRIEL, S., AND HUGHES, J. Smooth interpolation of orientations with angular velocity constraints using quaternions. Computer Graphics (Proc. of SIGGRAPH ’92) (1992), pp. 313-320.]]
2. BARRY, P., AND GOLDMANN, R. A recursive evaluation algorithm for a class of Catmull-Rom splines. Computer Graphics (Proc. of SIGGRAPH ’88) (1988), pp. 199-204.]]
3. CURTIS, M. Matrix Groups, Springer-Verlag, 1972.]]
4. DE BOOR, C. A Practical Guide to Splines, Springer-Verlag, 1978.]]
5. HAMILTON, W. Elements of Quaternions (Volume I, II), Chelsea Publishing Company, 1969.]]
6. JUNKINS, J., AND TURNER, J. Optimal continuous torque attitude maneuvers. J. Guidance and Control 3, 3 (1980), pp. 210-217.]]
7. JUNKIES, J., AND TURNER, J. Optimal Spacecraft Rotational Maneuvers, Elsevier, 1986.]]
8. JUTTLER, B. Visualization of moving objects using dual quaternion curves. Computers & Graphics 18, 3 (1994), pp. 315-326.]]
9. KIM, M.-J., KIM, M.-S., AND SHIN, S. A compact differential formula for the first derivative of a unit quaternion curve. To appear in J. of Visualization and Computer Animation (1995).]]
10. KIM, M.-J., KIM, M.-S., AND SHIN, S. A C2-continuous B- spline quaternion curve interpolating a given sequence of solid orientations. Proc. of Computer Animation ’95 (1995), pp. 72- 81.]]
11. KIM, M.-S., AND RAM, K.-W. Interpolating solid orientations with circular blending quaternion curves. To appear in Computer-Aided Design (1995).]]
12. NIELSON, G. Smooth interpolation of orientation. Models and Techniques in Computer Animation (Proc. of Computer Animation ’93) (1993), N. Thalmann and D. T. (Eds.), Eds., Springer-Verlag, pp. 75-93.]]
13. NIELSON, G., AND HEILAND, R. Animated rotations using quaternions and splines on a 4D sphere. Programmirovanie(Russia) (July-August 1992), Springer-Verlag, pp. 17-27. English edition, Programming and Computer Software, Plenum Pub., New York.]]
14. PLETINCKS, D. Quaternion calculus as a basic tool in computer graphics. The Visual Computer 5, 1 (1989), pp. 2-13.]]
15. POBEGAILO, A. Modeling of C~ spherical and orientation splines. To appear in Proc. of Pacific Graphics ‘ 95 (1995).]]
16. SCHLAG, J. Using geometric constructions to interpolate orientation with quaternions. Graphics GEMS H, Academic Press, 1992, pp. 377-380.]]
17. SHOEMAKE, K. Animating rotation with quaternion curves. Computer Graphics (Proc. of SIGGRAPH ’85) (1985), pp. 245-254.]]
18. SHOEMAKE, K. Quaternion calculus for animation. Math for SIGGRAPH (ACM SIGGRAPH ’91 Course Notes #2) (1991).]]
19. WANG, W. Rational spherical curves. Presented at Int’l. Conf. on CAGD, Penang, Malaysia (July 4-8, 1994).]]
20. WANG, W., AND JOE, B. Orientation interpolation in quaternion space using spherical biarcs. Proc. of Graphics Interface ’93 (1993), pp. 24-32.]]