“Time Follower’s Vision” by Sugimoto, Kagotani, Nii, Shiroma, Inami, et al. …
Notice: Pod Template PHP code has been deprecated, please use WP Templates instead of embedding PHP. has been deprecated since Pods version 2.3 with no alternative available. in /data/siggraph/websites/history/wp-content/plugins/pods/includes/general.php on line 518
Conference:
- SIGGRAPH 2004
-
More from SIGGRAPH 2004:
Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345

Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345


Type(s):
Entry Number: 28
Title:
- Time Follower’s Vision
Presenter(s):
Description:
Introduction
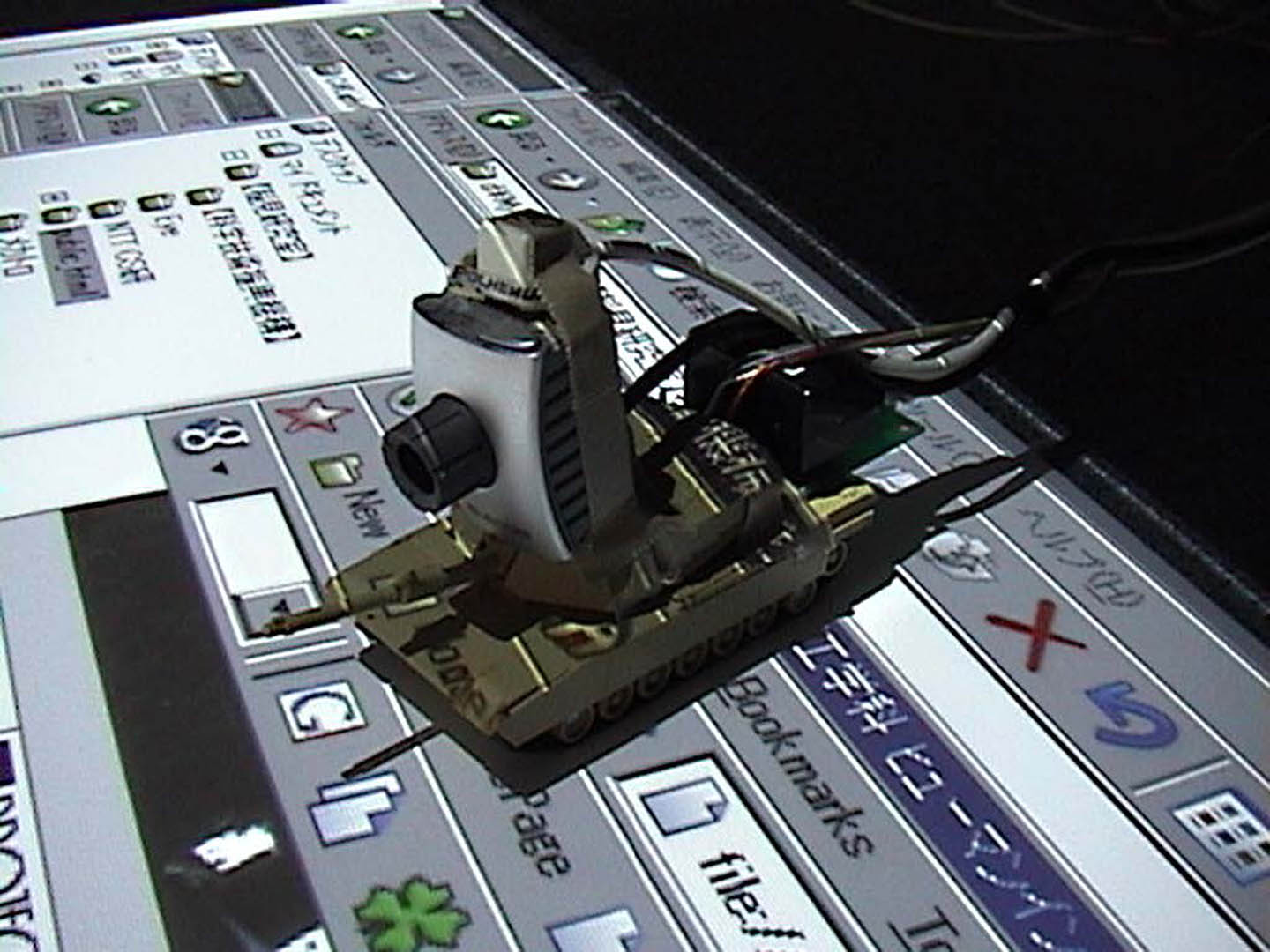
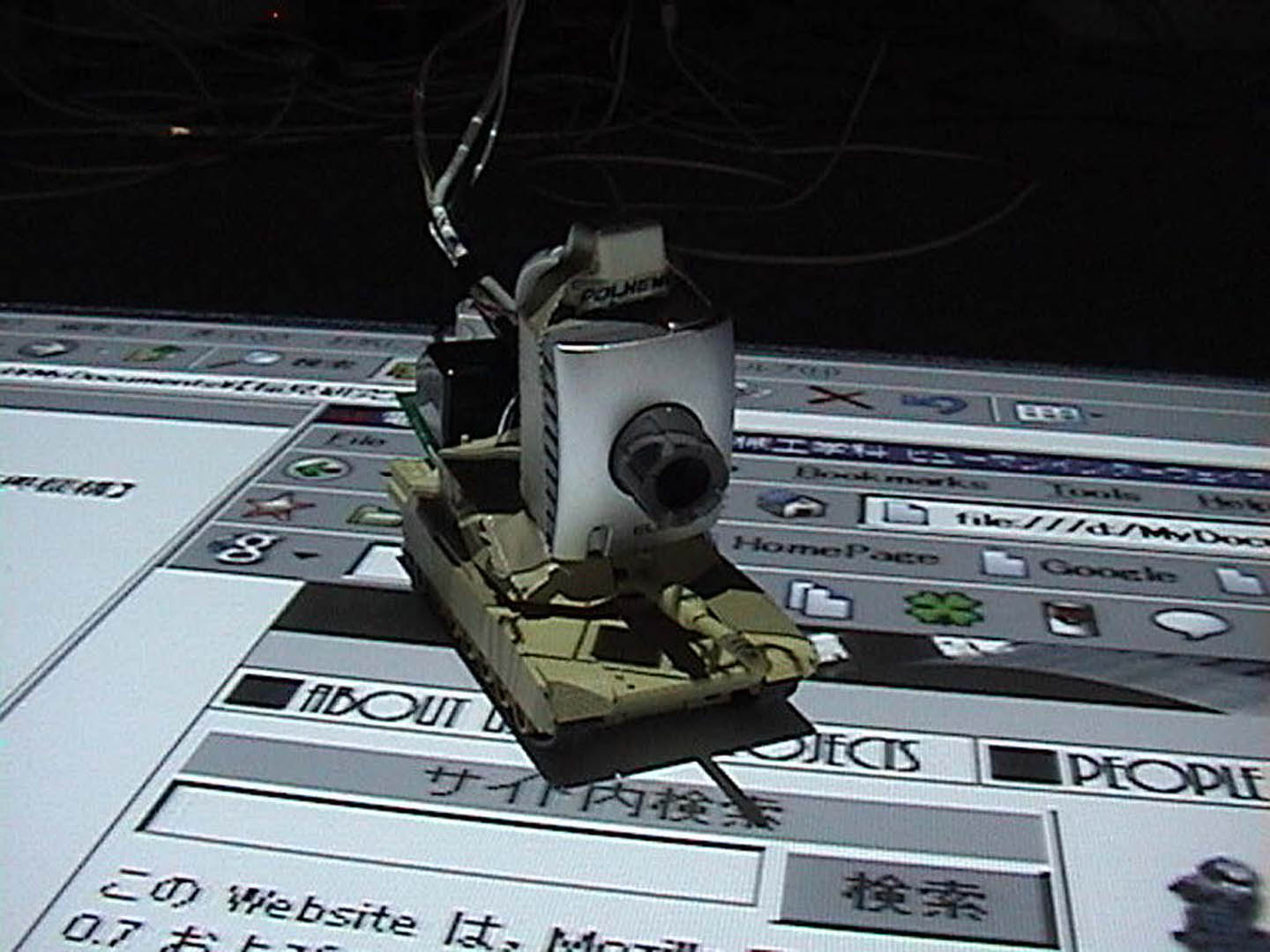
Time Follower’s Vision is an innovative visual presentation system for remote vehicle control. Autonomous robots provide a wide variety of enhancements and improvements to daily life, and research of this class of robot continues to advance worldwide. However, for fields like medical treatment, search-and-rescue missions, and interpersonal communication, the optimal approach is generally a robot with advanced movement capabilities but a non-autonomous control mechanism.
A non-autonomous type robot requires an operator in control, so an efficient human interface system is essential for good performance. For robotic systems controlled via telexistence, the operator performs remote tasks dexterously with the physical feeling of existing in a surrogate robot working in the remote environment. Although efficient operation systems enabling the operator to sense the remote environment have been developed, they require large-scale and high-cost equipment [Tachi 1998]. Further, operators require extensive training to adequately presume the posture of the vehicle from limited information.
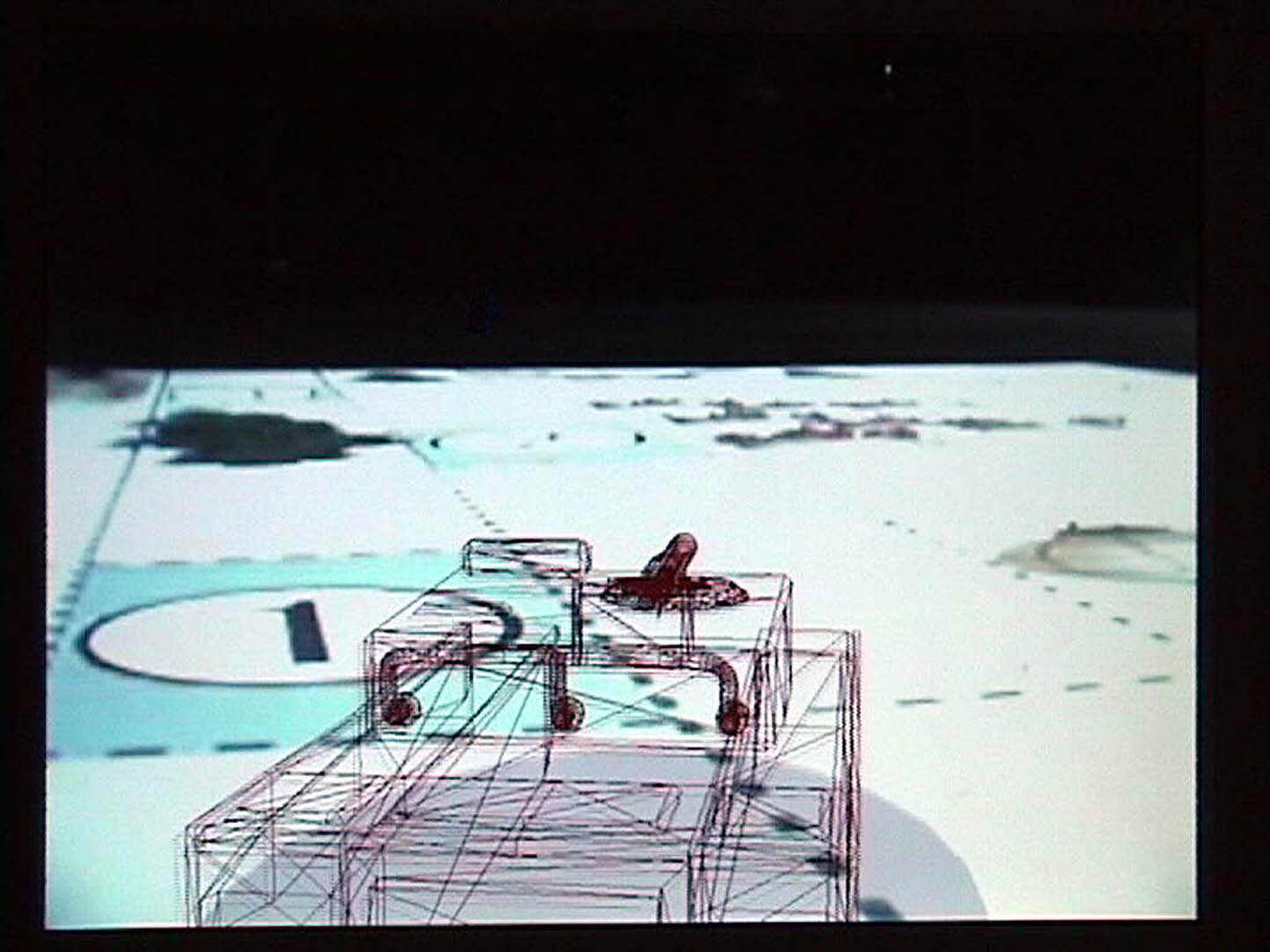
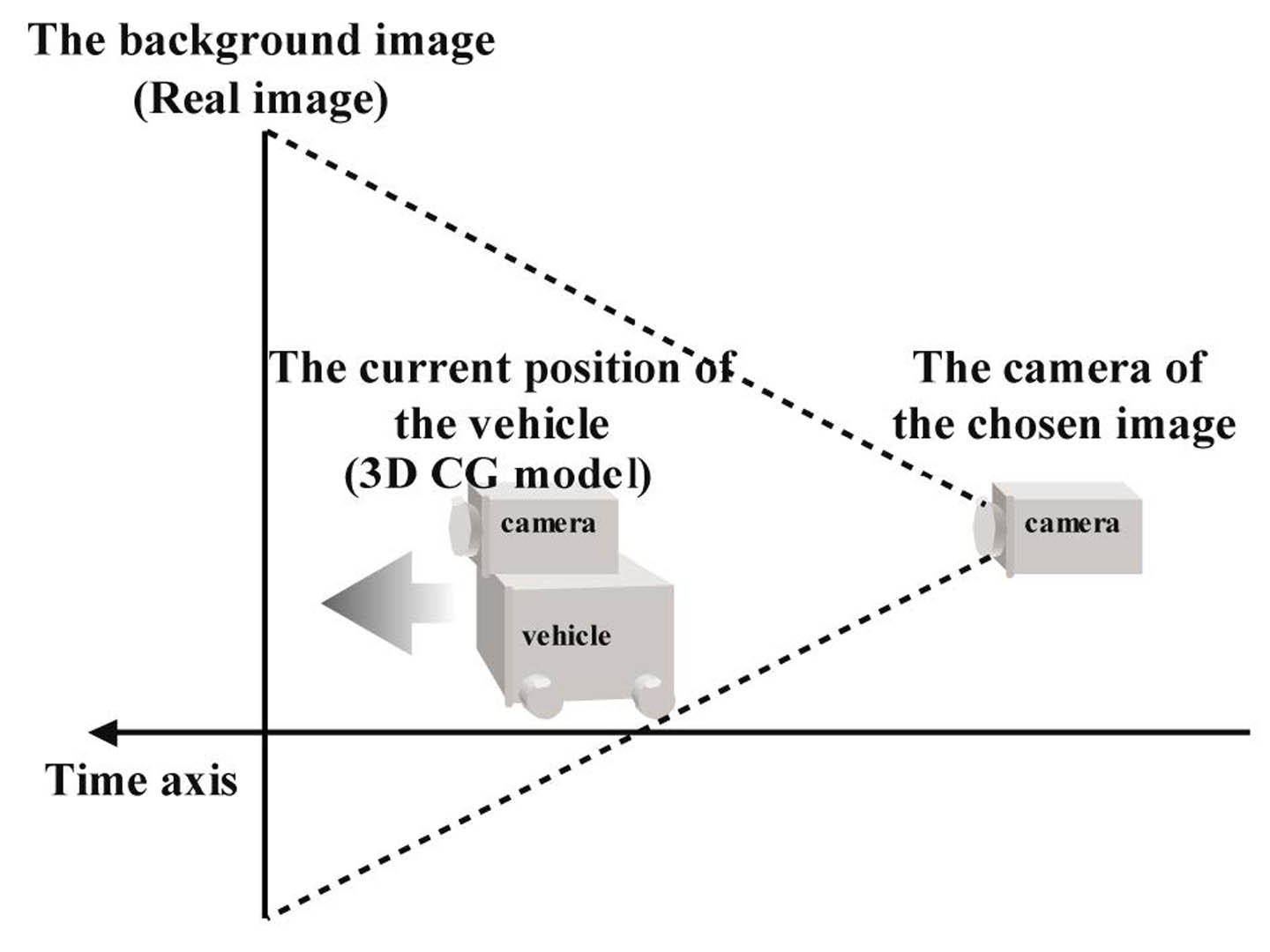
Time Follower’s Vision is a control system that solves these problems by producing a virtual image using Mixed Reality technology, and presenting the surrounding environment of the vehicle and the vehicle’s status to the operator. Therefore, even for inexperienced operators, the posture of the vehicle and the surrounding situation can be readily understood.
Other Information:
- Tachi, 1998. Real-time Remote Robotics. IEEE Computer Graphics and Applications, 18(6), pp.6-9.
- Tadokoro, et al., 2000. The RoboCup-Rescue Project. Proceedings of the 2000 IEEE International conference on Robotics & Automation, pp.4090-4095.
References
Additional Images: