
“Shared Haptic World” by Iwata
Conference:
- SIGGRAPH 1995
-
More from SIGGRAPH 1995:


Type(s):
Title:
- Shared Haptic World
Program Title:
- Interactive Communities
Presenter(s):
Collaborator(s):
Project Affiliation:
- University of Tsukuba
Description:
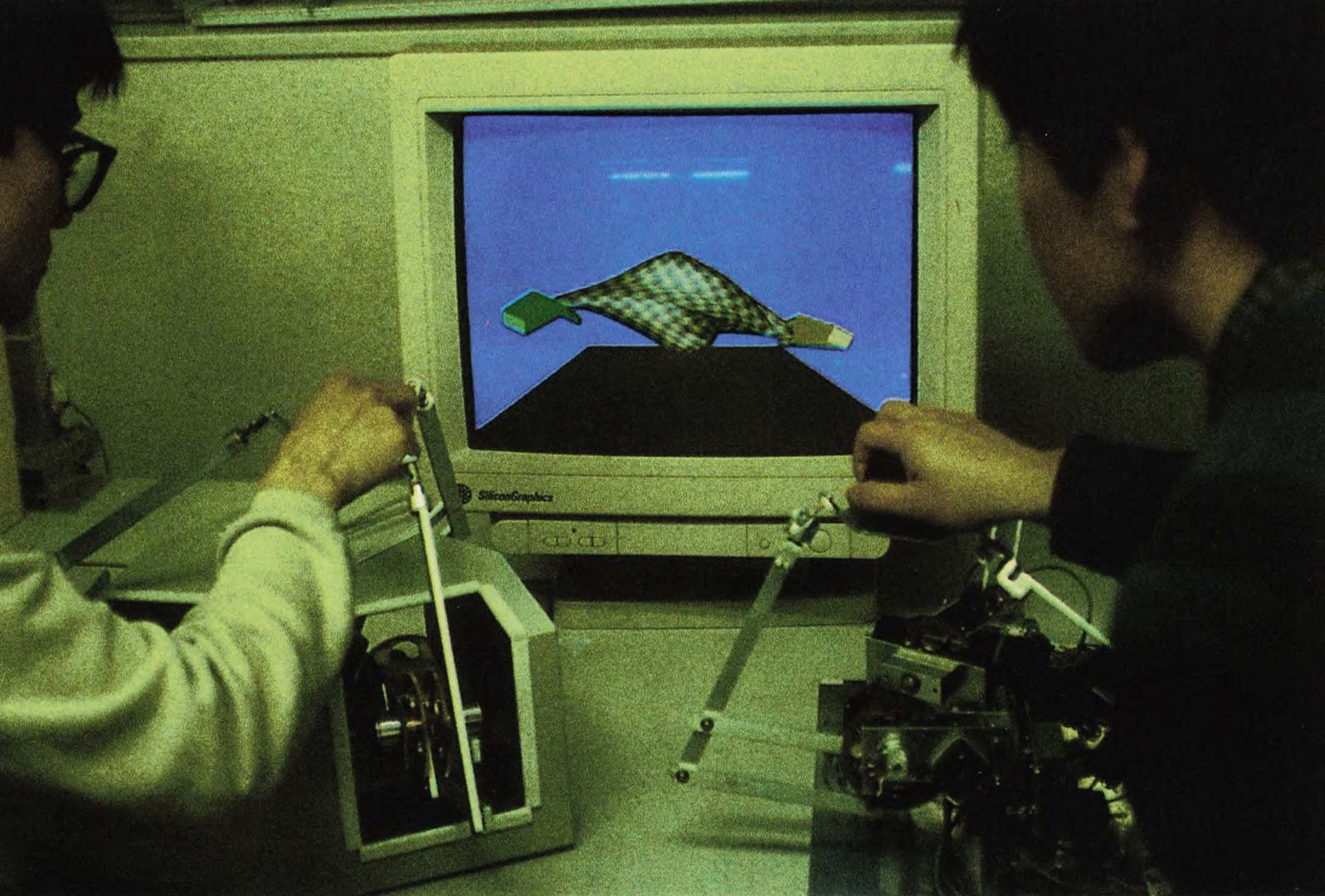
Force feedback plays an important role in manipulation in virtual environments. This project, an evolution of a system demonstrated at The Edge at SIGGRAPH 94, is realized by two desktop force displays. Two users feel reaction forces simultaneously, which enables them to cooperatively manipulate virtual objects. One user can grasp another’s virtual hand and feel the force applied by the other user, a function that is useful in trainer trainee interaction.
Shared Haptic World was developed with a new software tool, VECS (Virtual Environment Construction System), for programmers of haptic virtual environments. VECS enables high update rates of force display in a complex virtual environment. It interconnects multiple force displays through a network interface.
Using VECS, an autonomous free-form surface has been developed. It features functions similar to those of living creatures, such as surface tension, which enables restoration to its original shape. Other functions include feeding and avoidance of enemies. With VECS, users can interactively control time, congenital characteristics, and acquired characteristics of the autonomous freeform surface, and combine autonomous shape and intentional shape. This application can be applied to form study in industrial design.
In Shared Haptic World, two force displays demonstrate cooperative work. The system is also connected to a remote force display located in Japan. Visual and haptic aids compensate for the time delays between the Los Angeles and Japanese force displays.