
“Fusion: Full Body Surrogacy for Collaborative Communication” by Saraiji, Sasaki, Matsumura, Minamizawa and Inami

Conference:
- SIGGRAPH 2018
-
More from SIGGRAPH 2018:


Type(s):
Entry Number: 07
Title:
- Fusion: Full Body Surrogacy for Collaborative Communication
Presenter(s):
Description:
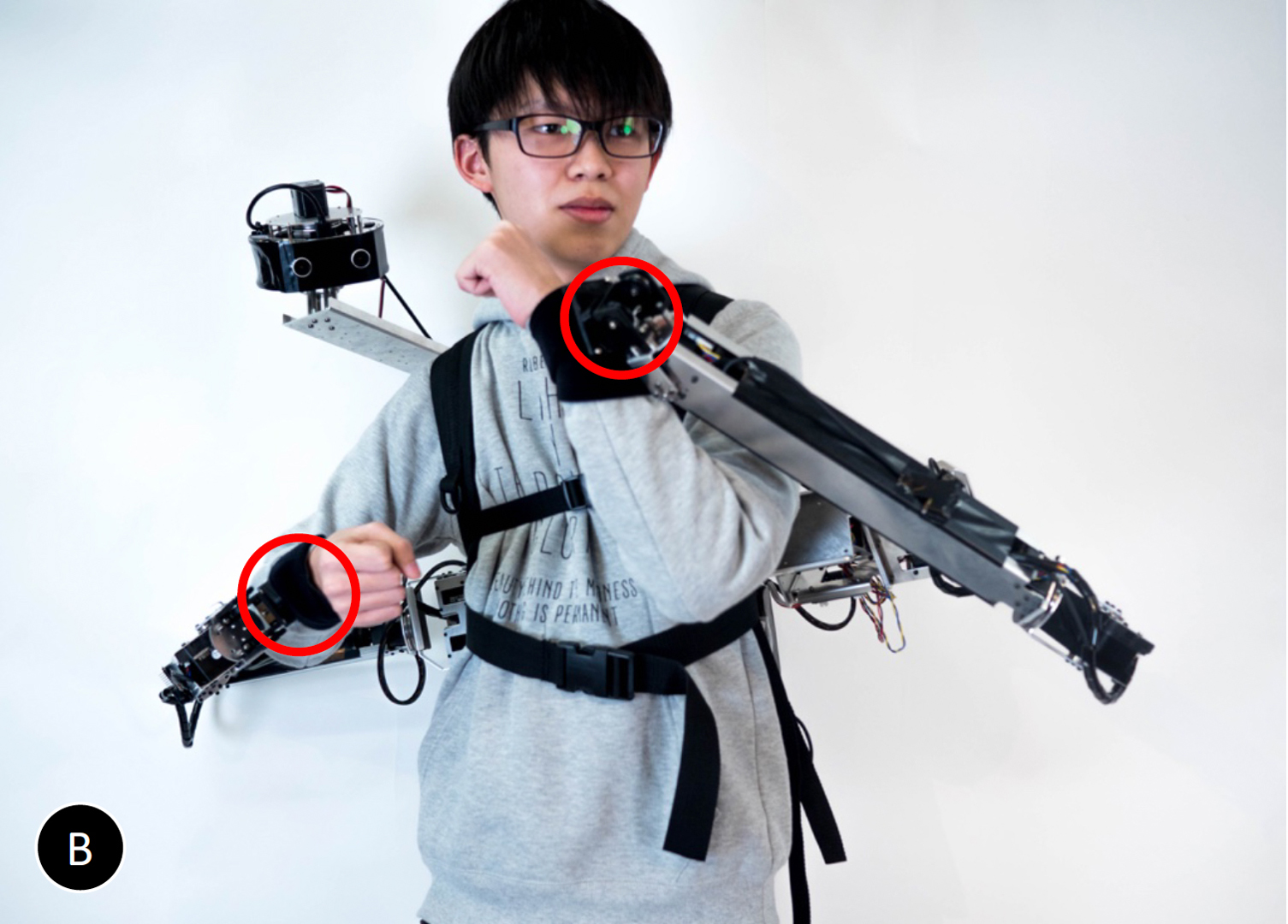
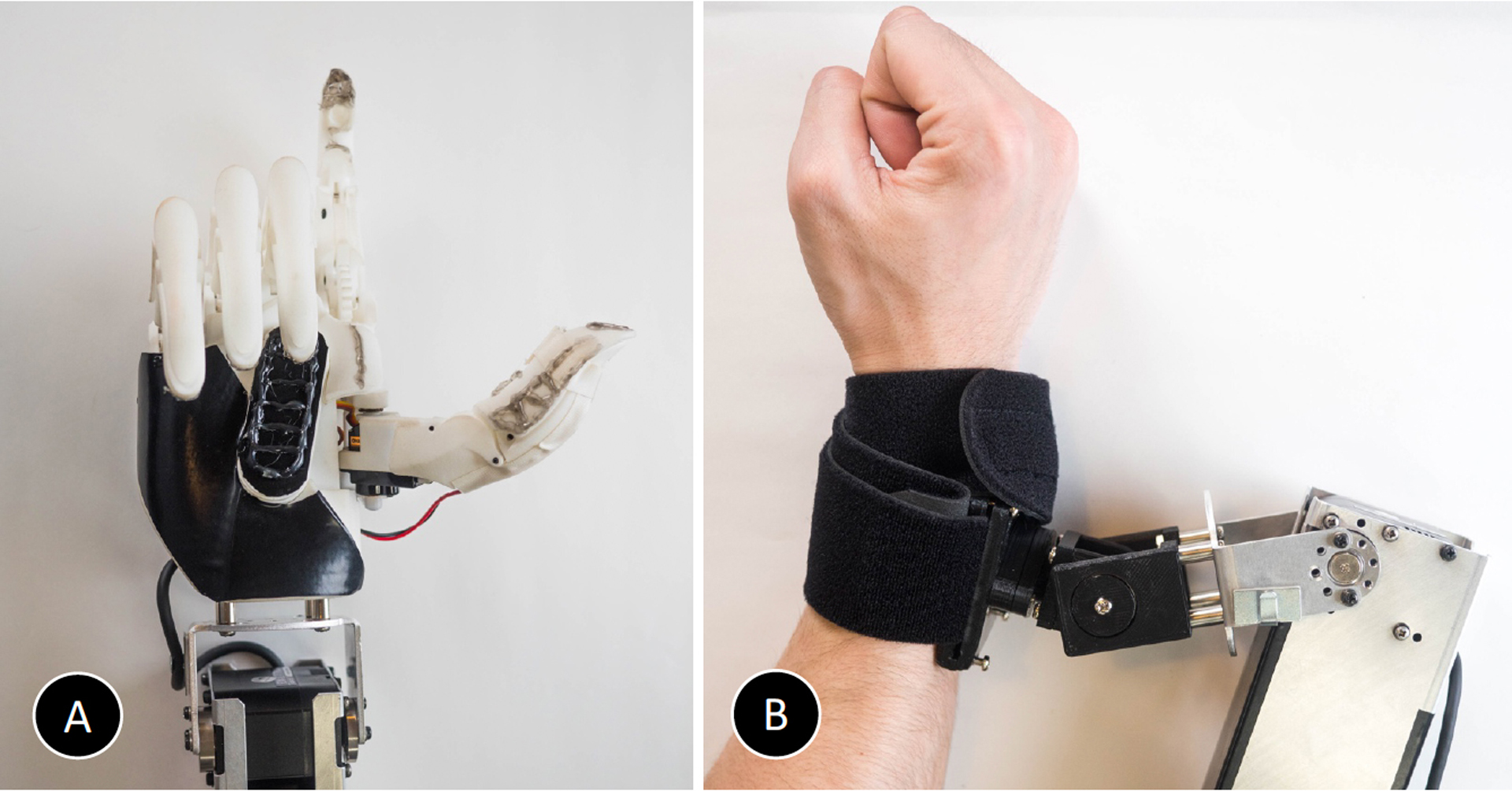
Effective communication is a key factor in social and professional contexts which involve sharing the skills and actions of more than one person. This research proposes a novel system to enable full body sharing over a remotely operated wearable system, allowing one person to dive into someone’s else body. “Fusion” enables body surrogacy by sharing the same point of view of two-person: a surrogate and an operator, and it extends the limbs mobility and actions of the operator using two robotic arms mounted on the surrogate body. These arms can be used independently of the surrogate arms for collaborative scenarios or can be linked to surrogate’s arms to be used in remote assisting and supporting scenarios. Using Fusion, we realize three levels of bodily driven communication: Direct, Enforced, and Induced. We demonstrate through this system the possibilities of truly embodying and transferring our body actions from one person to another, realizing true body communication.
References:
Shunichi Kasahara and Jun Rekimoto. 2015. JackIn head: immersive visual telepresence system with omnidirectional wearable camera for remote collaboration. In Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology. ACM, 217–225.
Gun A Lee, Theophilus Teo, Seungwon Kim, and Mark Billinghurst. 2017. Sharedsphere: MR collaboration through shared live panorama. In SIGGRAPH Asia 2017 Emerging Technologies. ACM, 12.
Jun Nishida and Kenji Suzuki. 2016. Biosync: Synchronous kinesthetic experience among people. In Proceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems. ACM, 3742–3745.
Keyword(s):
- Body scheme alternation
- collaborative systems
- Surrogacy
Additional Images:


Acknowledgements:
This project is supported by JST ERATO JIZAI BODY Project (JPMJER1701), JST ACCEL Embodied Media Project (JPMJAC1404), and JSPS KAKENHI Metabody project (JP15H01701), Japan.