“Fixed-Base Driving Simulator” by Cruz-Neira and Gruening

Conference:
- SIGGRAPH 1997
-
More from SIGGRAPH 1997:


Type(s):
Entry Number: 13
Title:
- Fixed-Base Driving Simulator
Program Title:
- Electric Garden
Presenter(s):
Collaborator(s):
Project Affiliation:
- Iowa State University
Description:
This virtual reality application is used as a testbed for Intelligent Vehicle Highway Systems and virtual prototyping. One of its main goals is to investigate the level of fidelity required for various human factors studies.
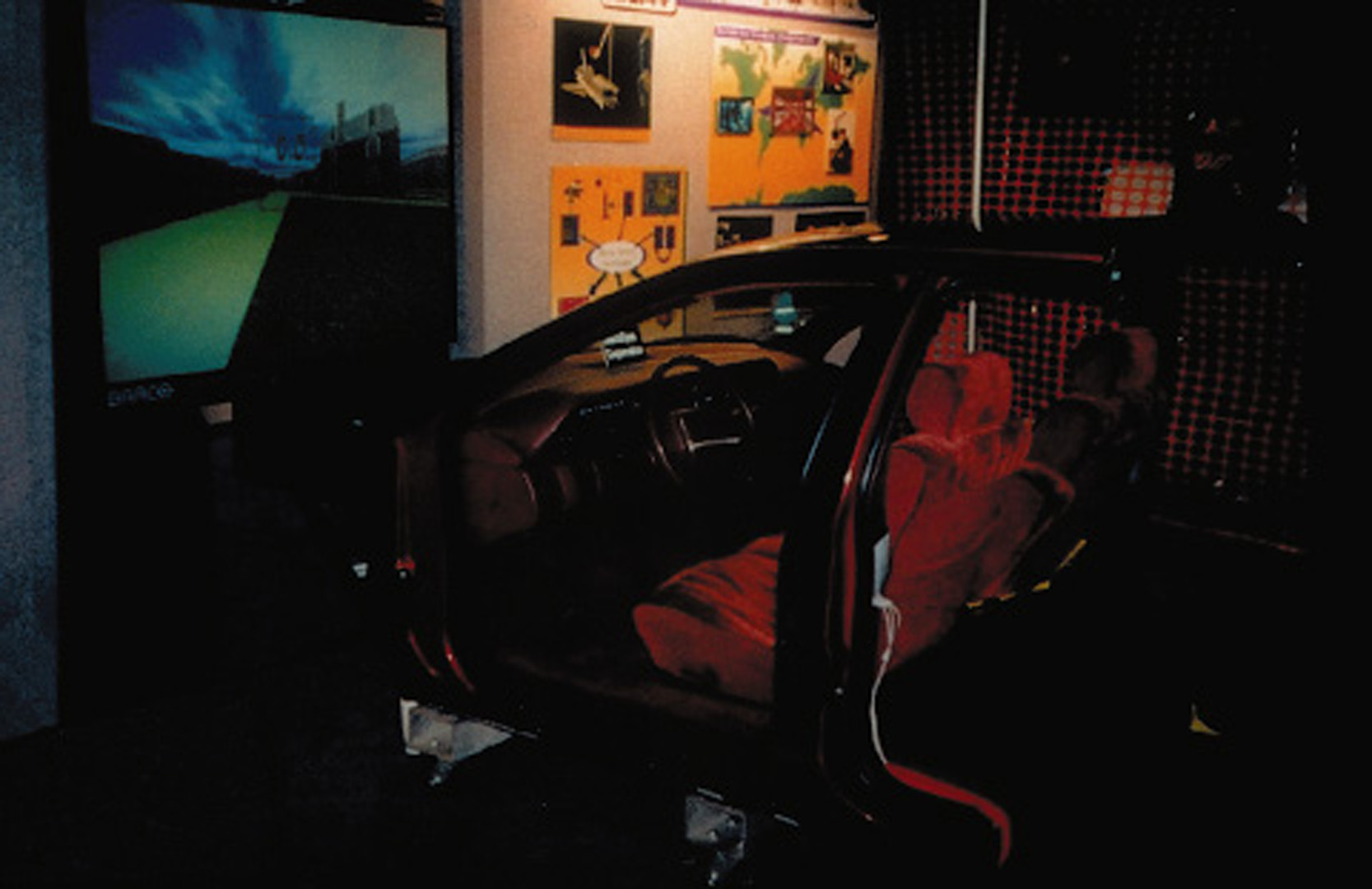
Vehicle dynamics are computed by a 13-degree-of-freedom vehicle simula- tion with over 130 parameters. The vehicle is controlled by inputs obtained from a steering wheel, an accelerator pedal, and a brake pedal. From these inputs, the vehicle dynamics provide visual, aural, and haptic feedback to the driver. The simulation also uses the inputs to update the vehicle’s positions, speed, and orientation in the virtual world. A unique low-speed algorithm allows the vehicle to come to a stop without the sin- gularity caused in classical vehicle dynamic simulations.
To provide drivers with a realistic steering feel, control loading (haptics) has been carefully implemented. Real-time vehicle dynamics generate the torque applied to the steering wheel, which greatly enhances the driver’s immersive experience and creates a more compelling driving scenario for testing and evaluation
Additional Images: