“Camera-less Smart Laser Projector” by Cassinelli, Zerroug, Watanabe, Ishikawa and Ängeslevä
Conference:
- SIGGRAPH 2010
-
More from SIGGRAPH 2010:



Type(s):
Entry Number: 09
Title:
- Camera-less Smart Laser Projector
Presenter(s):
Description:
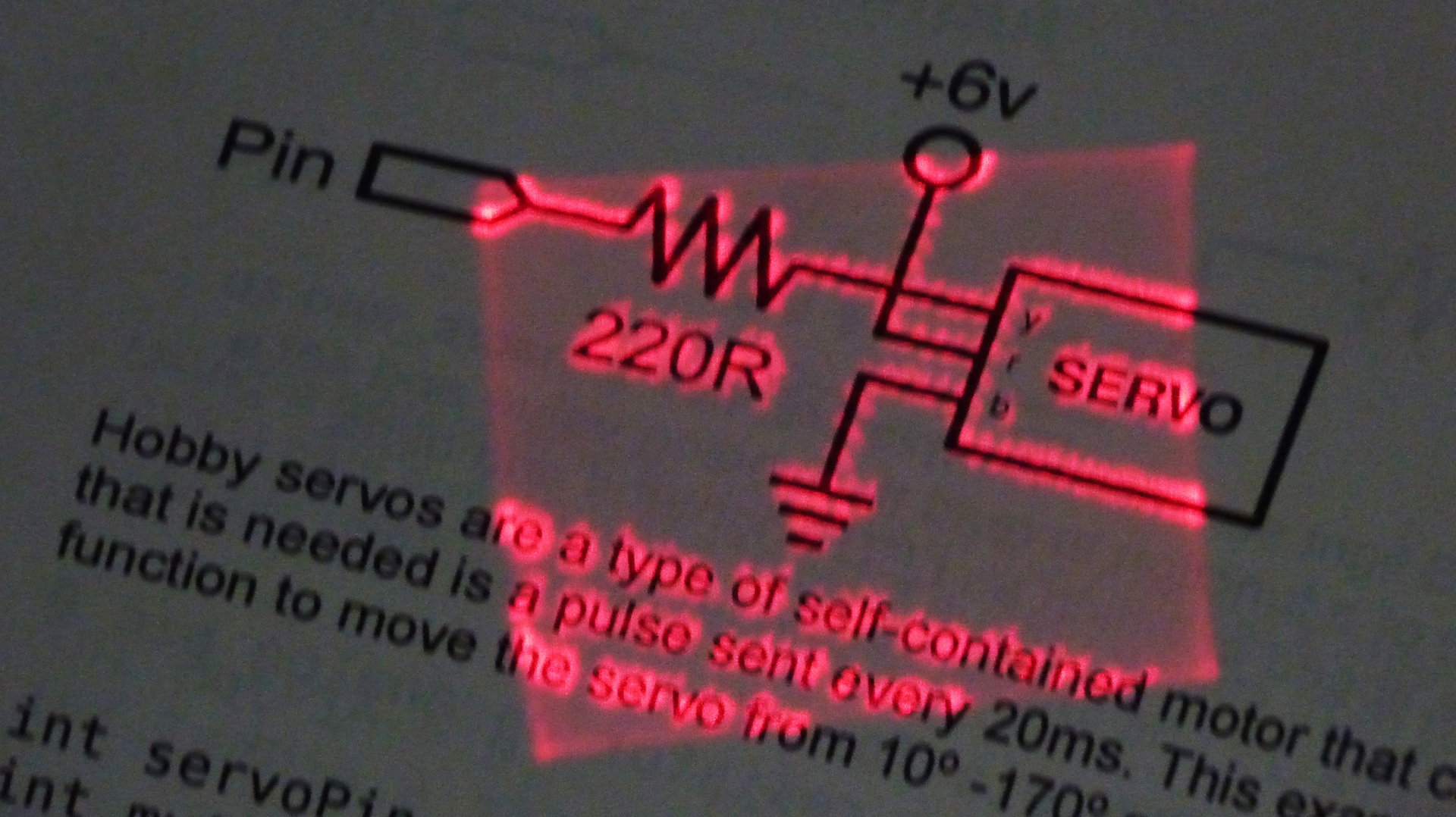
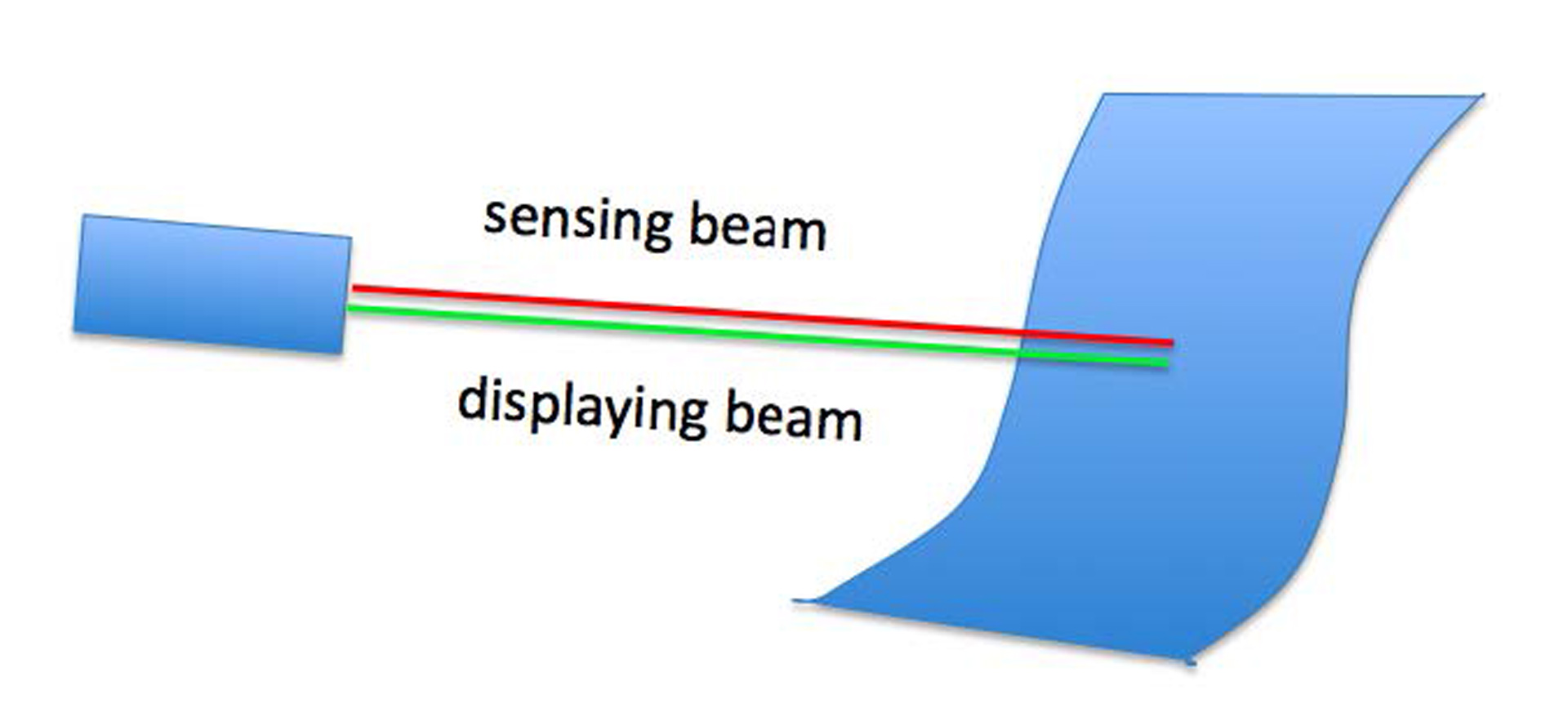
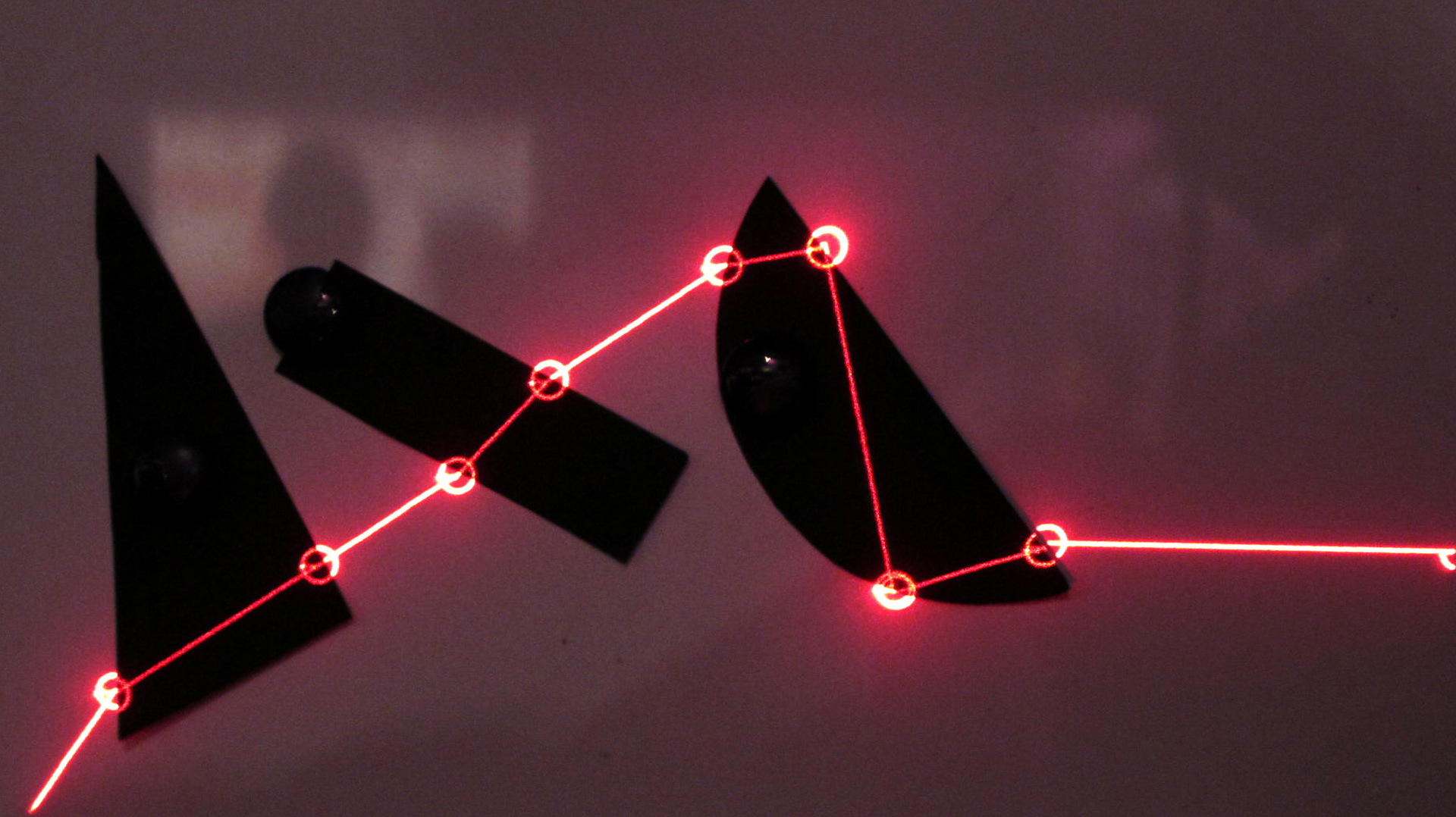
The ’Smart Laser Projector’ (SLP) is a modified laser-based projector capable of displaying while simultaneously using the laser beam (at the same or different wavelength or polarization) as a LIDAR probe gathering information about the projection surface (its borders, 3d shape, relative position and orientation, as well as fine texture and spectral reflectance). This information can then be used to correct perspective warp, perform per-pixel contrast compensation, or even reroute the scanning/projecting path altogether (for tracking, feature discovery or barcode reading for instance). We demonstrate here raster-scan and vector graphics applications on two different prototypes. The first relies on a pair of galvanomirrors, and is used for demonstrating simultaneous tracking and display on the palm of the hand, depth-discriminating active contours (for spatially augmented reality surveying), and interactive games. The other relies on a single 2-axis MEMS mirror working in resonant mode, and is used to demonstrate edge enhancement of printed material and ’artificial fluorescence’ – all with perfect projection-to-real-world registration by construction.
Other Information:
References
CASSINELLI, A., PERRIN, S., AND ISHIKAWA, M. 2005. Smart laser-scanner for 3d human-machine interface. In CHI ’05, 1138–1139.
CASSINELLI, A., KURIBARA, Y., ISHIKAWA, M., AND MANABE, D. 2009. scorelight. In SIGGRAPH ASIA ’09 Art Gallery & Emerging Technologies: Adaptation, 15–15.
RASKAR, R., VAN BAAR, J., BEARDSLEY, P., WILLWACHER, T., RAO, S., AND FORLINES, C. 2005. ilamps: geometrically aware and self-configuring projectors. In SIGGRAPH ’05: ACM SIGGRAPH 2005 Courses, 5.
Additional Images: