
“Altered Touch: Miniature Haptic Display with Force, Thermal and Tactile Feedback for Augmented Haptics” by Murakami, Person, Fernando and Minamizawa


Conference:
Experience Type(s):
Title:
- Altered Touch: Miniature Haptic Display with Force, Thermal and Tactile Feedback for Augmented Haptics
Entry Number: 02
Organizer(s)/Presenter(s):
Description:
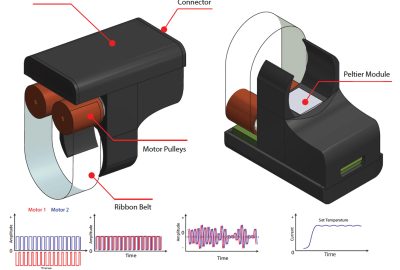
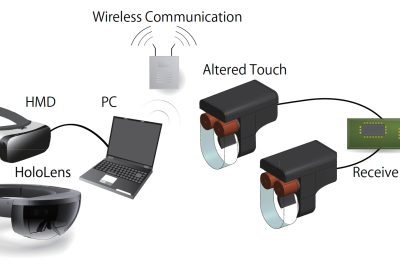
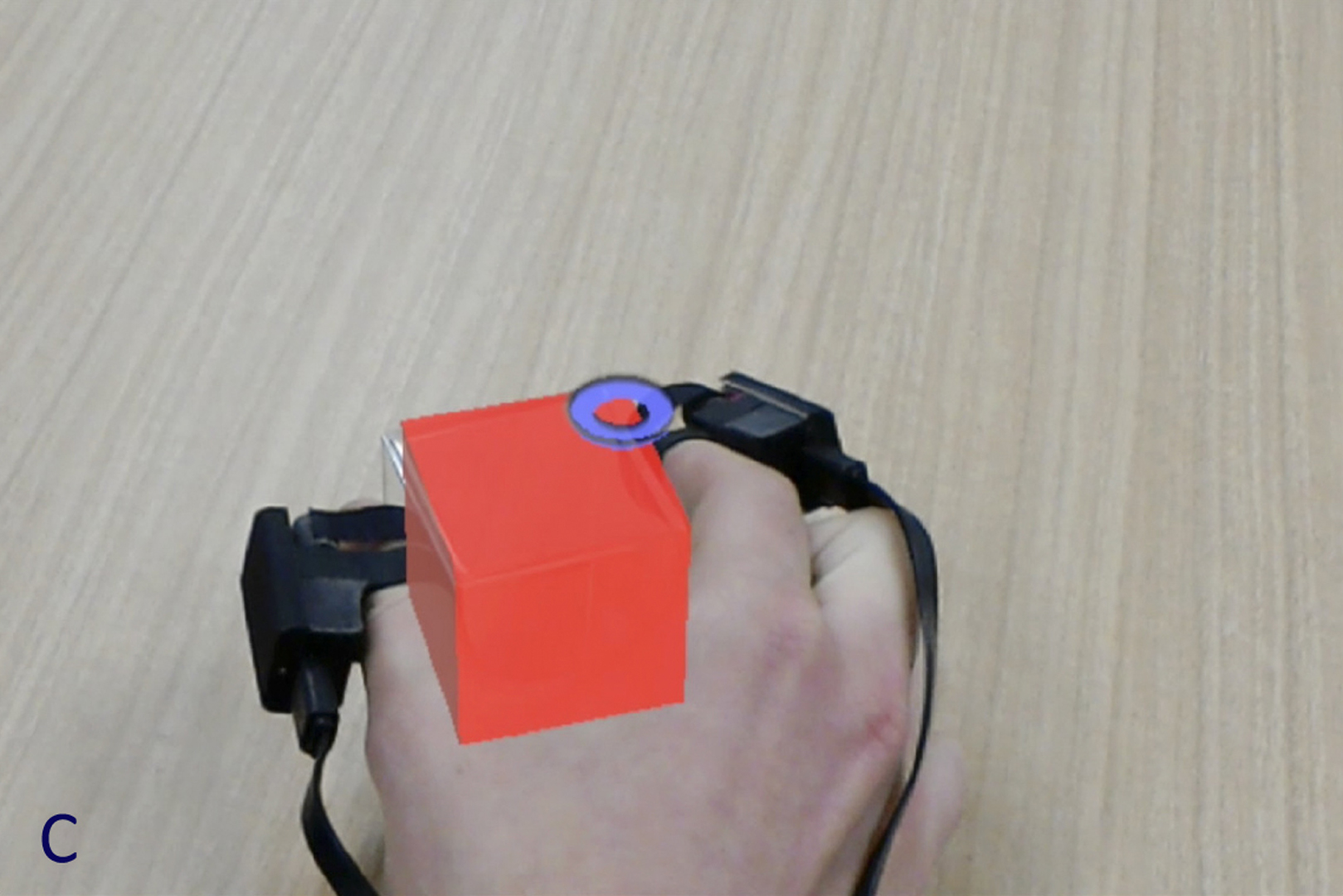
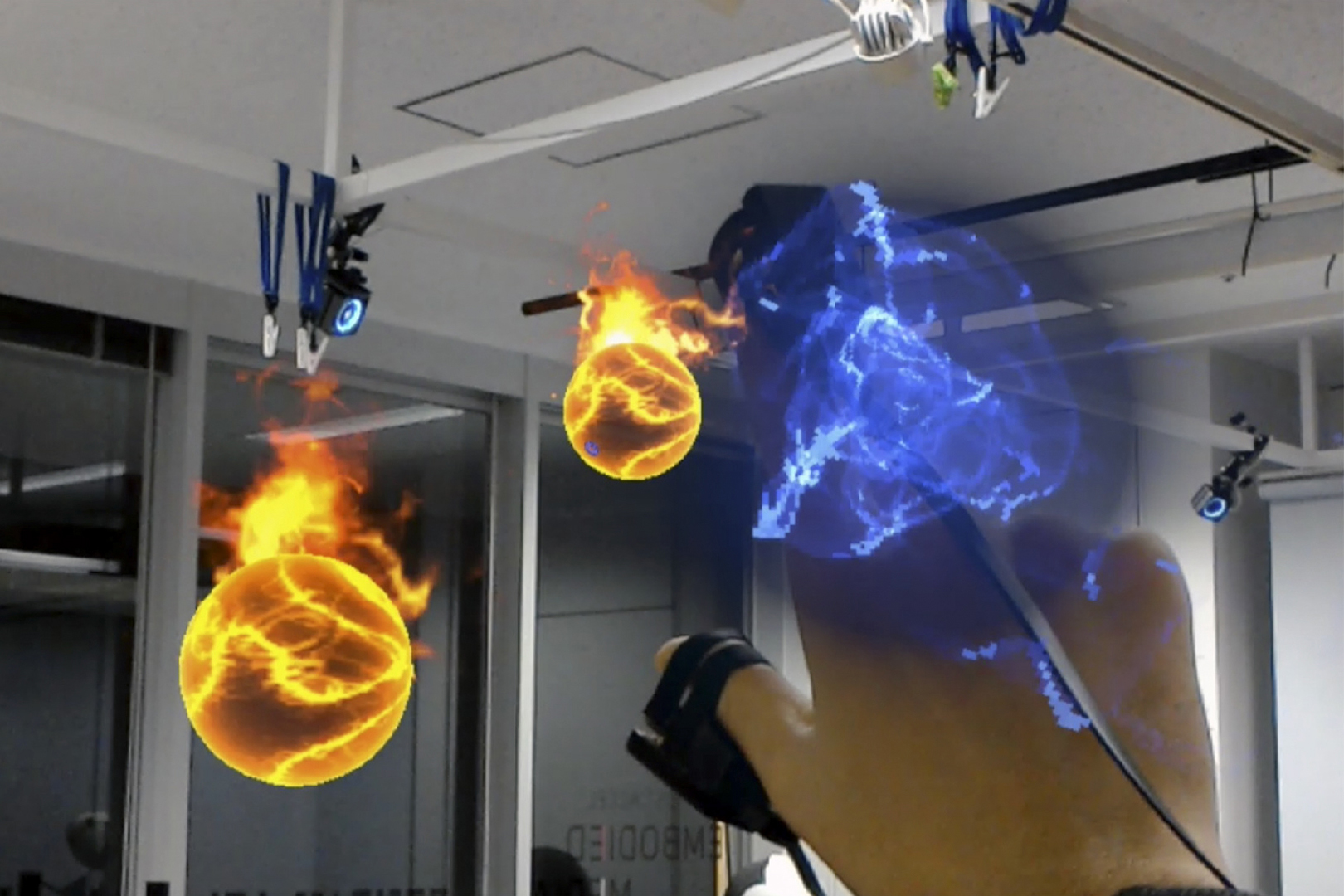
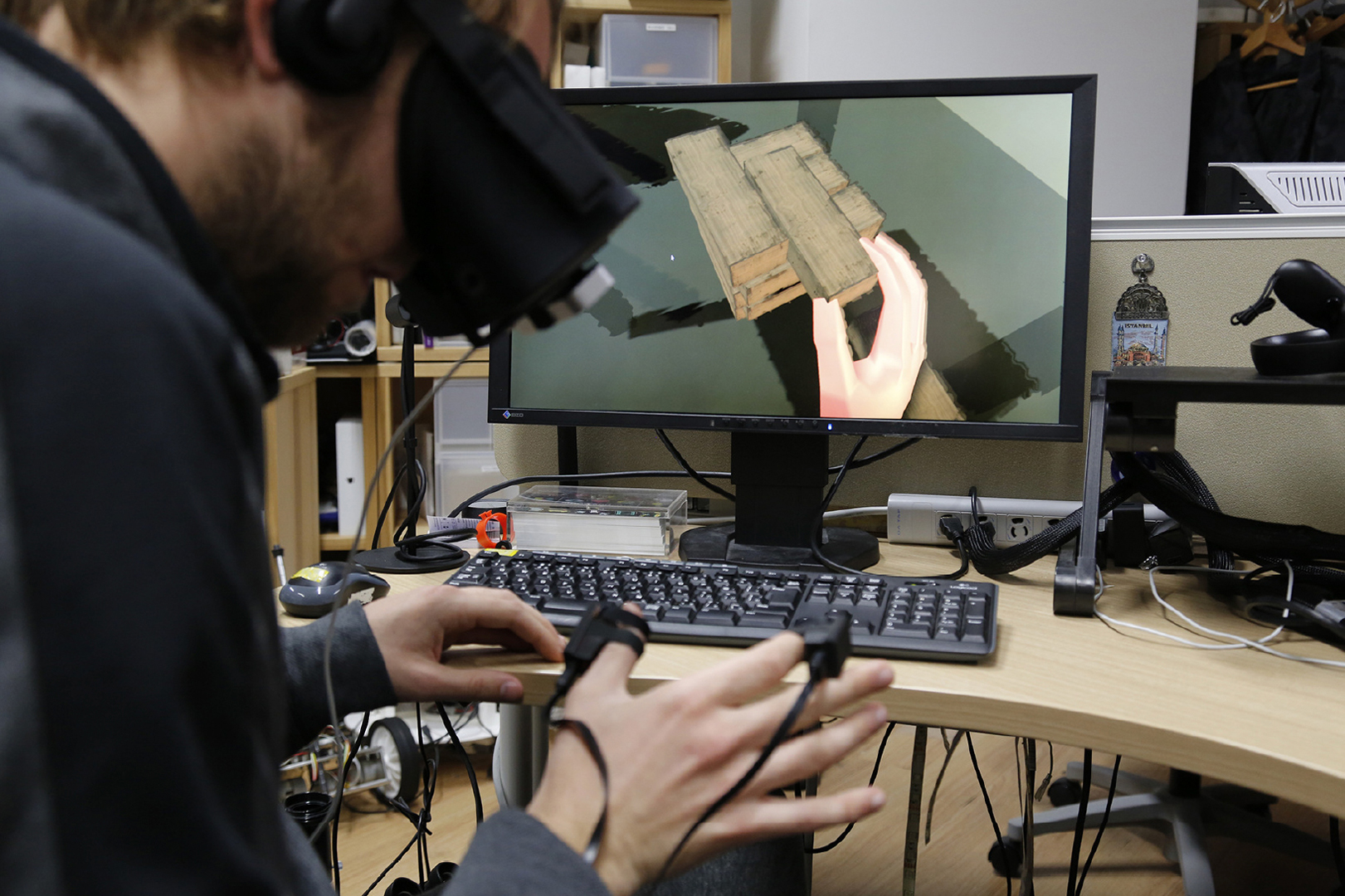
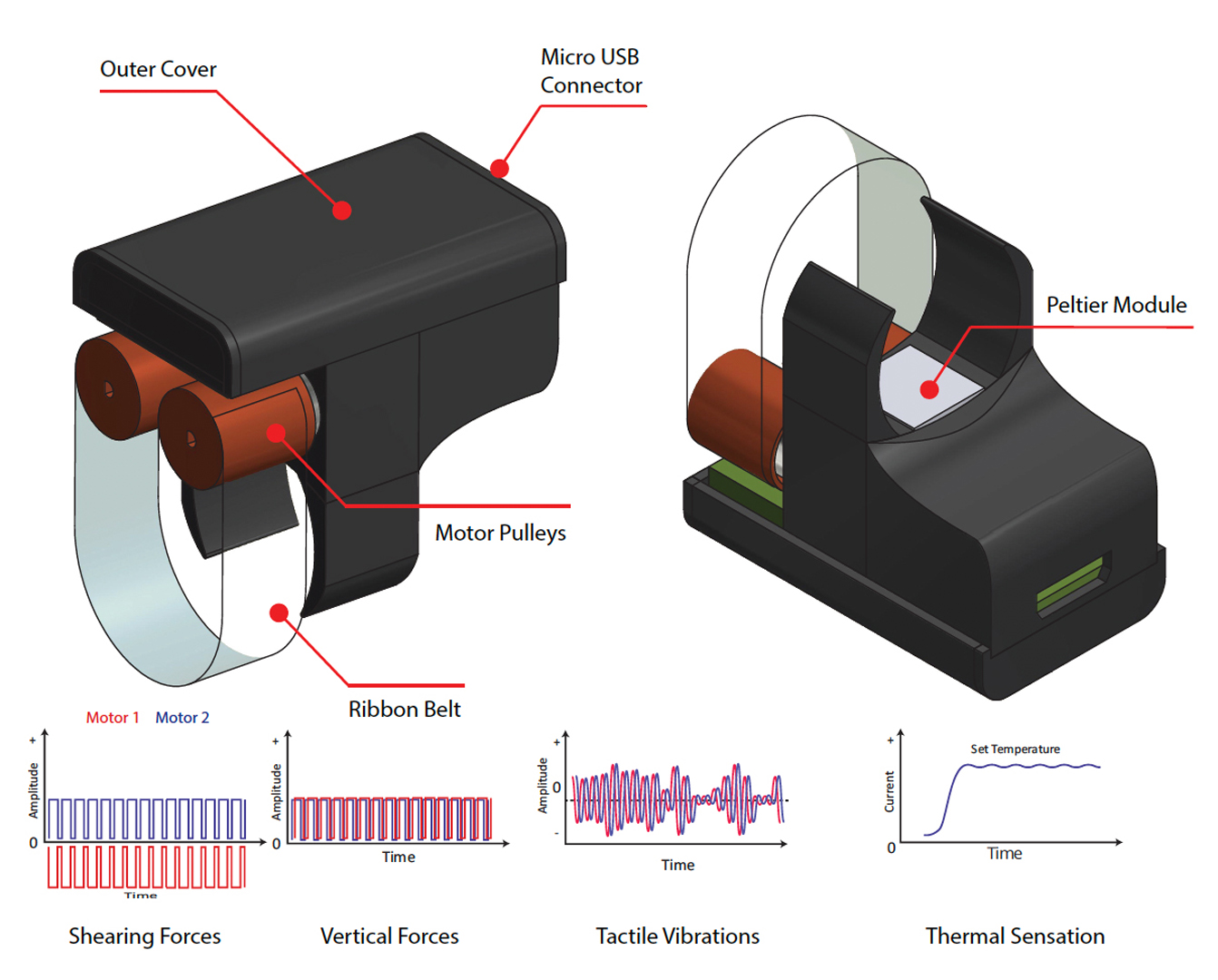
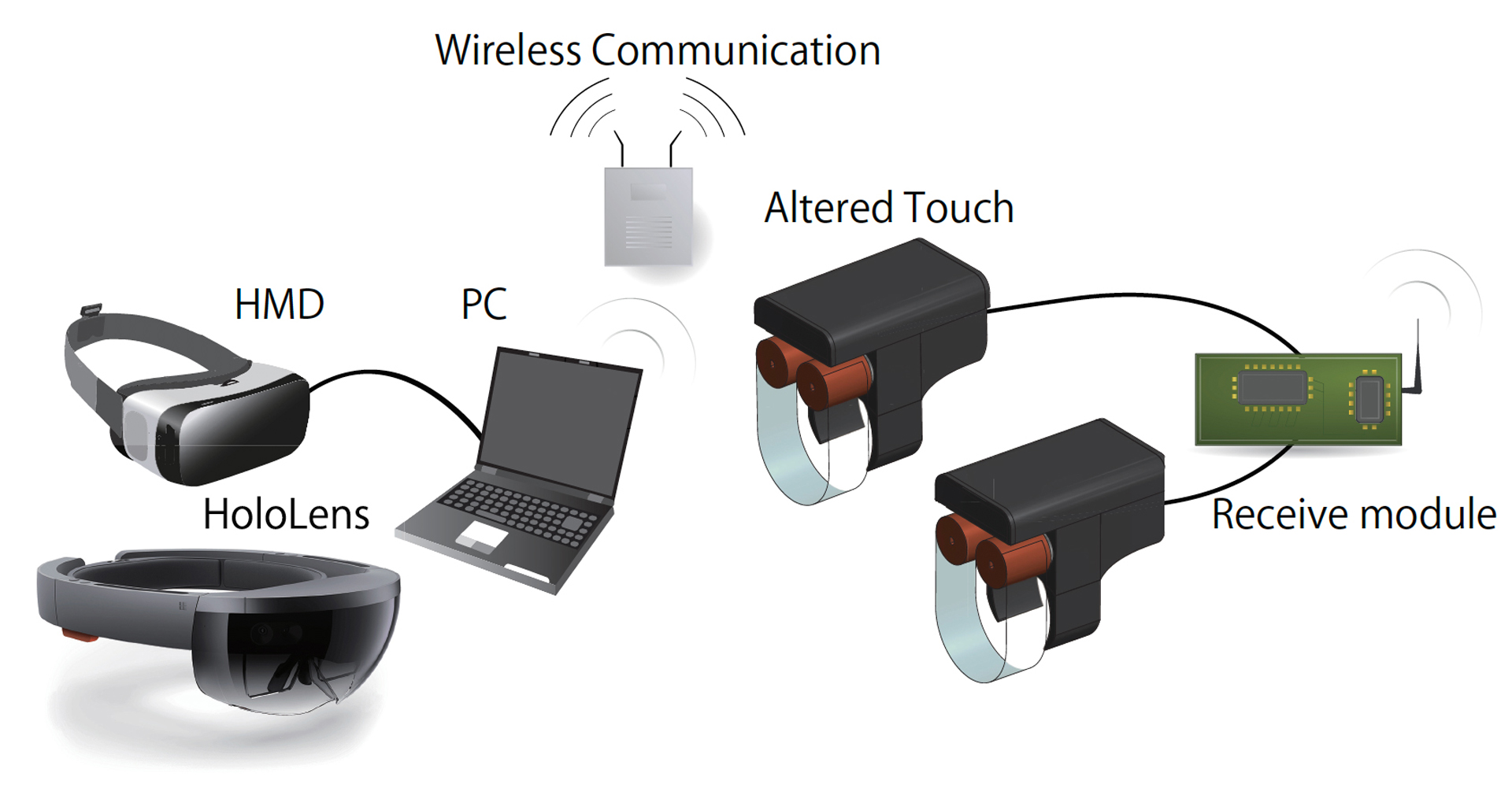
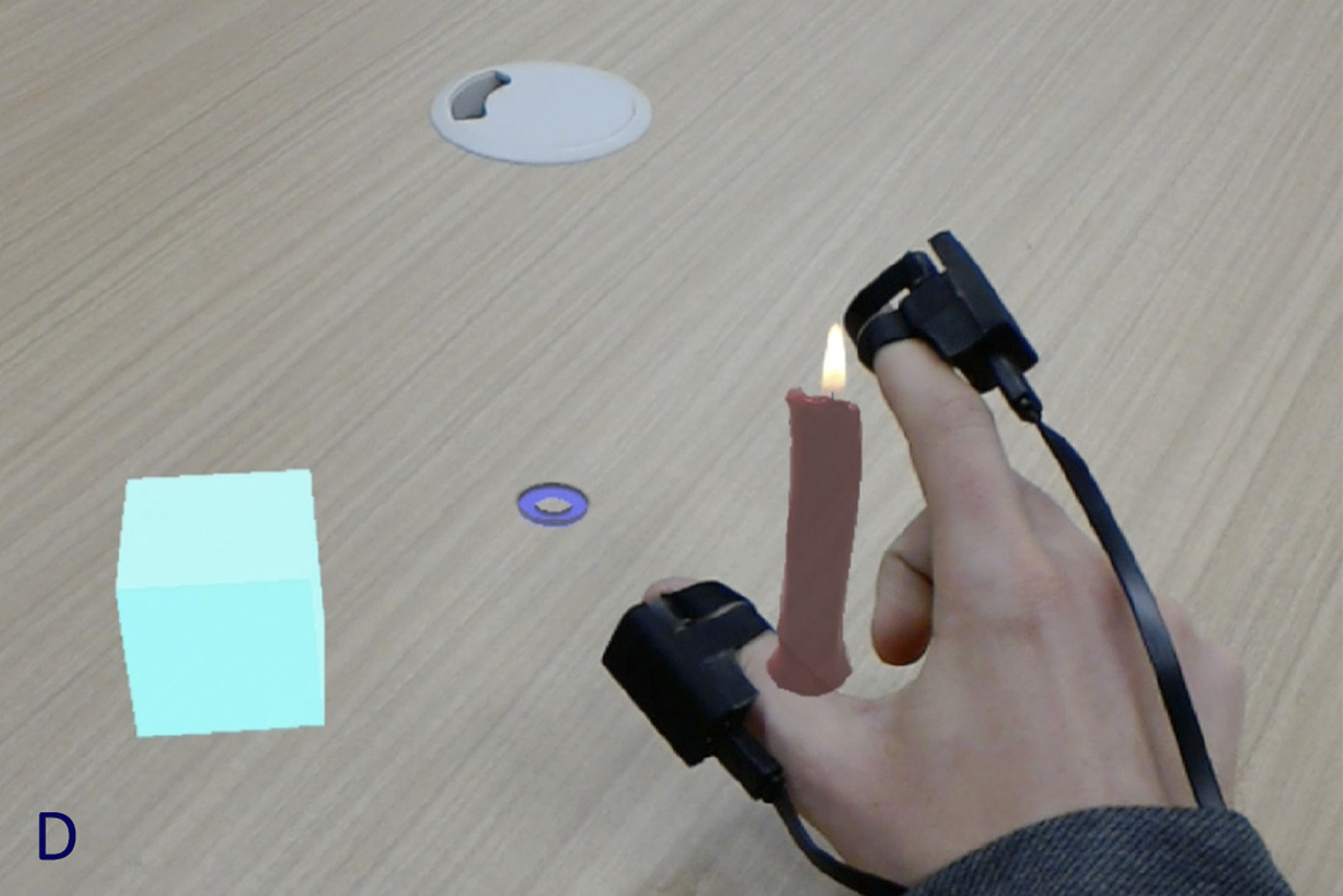
In this paper, (1) we developed a fingertip haptic display with integrated force, tactile and thermal feedback in a miniature form-factor such that it can be worn easily and used with augmented reality applications without affecting the existing tracking technologies. (2) we propose the concept of ”Altered Touch”, where the integrated fingertip haptic display stated in (1) was used to alter the haptic properties of real objects by rendering projected visual and haptic feedback. The system consists of our own force display Gravity Grabber mechanism[Minamizawa et al. 2007] to render vertical, shearing forces, high frequency tactile vibrations, and a peltier module for thermal display. The integrated haptic display module weighs less than 50g, can be easily interfaced to a PC with just one micro USB cable, and works standalone from any other additional hardware. In this paper we use this wearable haptic actuator in several augmented reality applications to alter the softness/hardness and hot/cold sensation and several use cases have been discussed. Furthermore, the haptic display could be expanded to design a haptic glove that can interact with both virtual and augmented worlds.
References:
Charith Lasantha Fernando, Masahiro Furukawa, Tadatoshi Kurogi, Kyo Hirota, Sho Kamuro, Katsunari Sato, Kouta Minamizawa, and Susumu Tachi. 2012. TELESAR V: TELExistence surrogate anthropomorphic robot. In ACM SIGGRAPH 2012 Emerging Technologies. ACM, 23.
Kouta Minamizawa, Souichiro Fukamachi, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi. 2007. Gravity grabber: wearable haptic display to present virtual mass sensation. In ACM SIGGRAPH 2007 emerging technologies. ACM, 8. Takuji Narumi, Takashi Kajinami, Tomohiro Tanikawa, and Michitaka Hirose. 2010. Meta cookie. In ACM SIGGRAPH 2010 Posters. ACM, 143.
Alvaro G Perez, Daniel Lobo, Francesco Chinello, Gabriel Cirio, Monica Malvezzi, Jose San Martin, Domenico Prattichizzo, and Miguel A Otaduy. 2016. Optimization- Based Wearable Tactile Rendering. IEEE Transactions on Haptics (2016).
Vibol Yem, Ryuta Okazaki, and Hiroyuki Kajimoto. 2016. Vibrotactile and pseudo force presentation using motor rotational acceleration. In Haptics Symposium (HAPTICS), 2016 IEEE. IEEE, 47–51.
Keyword(s):
- Augmented Haptics
- Force Sensation
- Thermal Sensation
- Tactile Sensation
-

-

-

-
-
-

Additional Images:
Acknowledgements:
This work is supported by JST ACCEL Embodied Media Project Grant Number JPMJAC1404.