
C. Karen Liu
About C. Karen Liu
Affiliations (Current and Past)
- Georgia Institute of Technology (Georgia Tech), School of Interactive Computing, Assistant Professor
- University of Southern California (USC), Assistant Professor
- Stanford University
Location
- Atlanta, Georgia, United States of America
Awards and Recognition
- SIGGRAPH 2012 Significant New Researcher Award: Liu
- ACM SIGGRAPH Academy Member, inducted in 2021
SIGGRAPH Conference Organizing Committee Positions
Committee Chair
- SIGGRAPH Asia 2019: Technical Papers
Committee Member
- SIGGRAPH Asia 2016: Technical Papers
- SIGGRAPH Asia 2018: Technical Papers
- SIGGRAPH Asia 2018: Technical Papers
- SIGGRAPH Asia 2020: Technical Papers
- SIGGRAPH Asia 2024: Technical Papers
Jury Member
- SIGGRAPH 2008: Technical Papers
Conference Contributions
Learning
-
Frontiers
 Presenter(s):
Presenter(s):- Adam W. Bargteil
- Alex Bryant
- Andrew Glassner
- Bruce Nunzio Tartaglia
- Douglas (Doug) Roble
- Hanspeter Pfister
- Heather Pritchett
- Jeff Lait
- Jessica K. Hodgins
- Jinny Hye Jin Choo
- Joaquim A. Jorge
- C. Karen Liu
- Marisa Tontaveetong
- Mark Elendt
- Mashhuda Glencross
- Mikki Rose
- Ming C. Lin
- Miriah Meyer
- Munkhtsetseg (Muunuu) Nandigjav
- Natalya Tatarchuk
- Peter Shirley
- Pol Jeremias-Vila
- Theodore Kim
- Tomasz Bednarz
- Tom Emrich
Posters
Talks-Sketches
Technical Papers
 Presenter(s):Entry #: 144
Presenter(s):Entry #: 144 Sessions Moderated
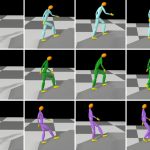
- “Deep learning of biomimetic sensorimotor control for biomechanical human animation” by Nakada, Zhou, Chen, Weiss and Terzopoulos
- “Dexterous manipulation and control with volumetric muscles” by Lee, Yu, Park, Aanjaneya, Sifakis, et al. …
- “The human touch: measuring contact with real human soft tissues” by Pai, Rothwell, Wyder-Hodge, Wick, Fan, et al. …
- “An empirical rig for jaw animation” by Zoss, Bradley, Bérard and Beeler
- “Ambient sound propagation”
- “Aerial path planning for urban scene reconstruction: a continuous optimization method and benchmark”
- “Flycon: real-time environment-independent multi-view human pose estimation with aerial vehicles”
- “Aerobatics control of flying creatures via self-regulated learning”






















Other Information
Roles
- ACM SIGGRAPH Academy Member
- Awardee
- Frontiers Presenter
- Talk (Sketch) Presenter
- Technical Paper Moderator
- Technical Paper Presenter
- Technical Papers Jury Member
- Technical Papers Organizing Committee Chair/Co-Chair
- Technical Papers Organizing Committee Member
Submit a Story
- If you would like to submit a story about this person (please keep it funny, informative and true), please contact us: historyarchives@siggraph.org
If you find errors or omissions on your profile page, please contact us: historyarchives@siggraph.org
Did you know you can send us a photo of yourself and a bio and we will post it? Make sure the photo is at least 1000 x 1000 and send it to the email above along with the bio and we will add it to your page.