
Shinjiro Sueda
About Shinjiro Sueda
Affiliations (Current and Past)
- Texas A&M University
- University of British Columbia (UBC), Sensorimotor Systems Laboratory
- Rutgers University
- The Walt Disney Company, Disney Research Boston
Location
- United States of America
Bio
SIGGRAPH Asia 2018
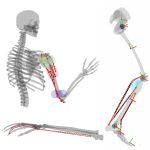
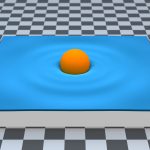
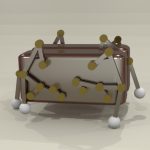
Shinjiro Sueda is an assistant professor of computer science at Texas A&M University. Prior to this appointment, he was an assistant professor at California Polytechnic State University after completing a post-doctoral fellowship at Disney Research Boston and MIT. He received his Ph.D. from the University of British Columbia. His main research area is computer graphics and animation, specializing in physically based animation, biomechanical simulations, and computational fabrication.
SIGGRAPH Conference Organizing Committee Positions
Conference Contributions
Experiences
-
VR Experiences
Learning
-
Talks-Sketches
Technical Papers













Other Information
Roles
- Immersive Pavilion (VR Village) Developer
- Talk (Sketch) Presenter
- Technical Paper Presenter
- Technical Papers Jury Member
- Technical Papers Organizing Committee Member
Submit a Story
- If you would like to submit a story about this person (please keep it funny, informative and true), please contact us: historyarchives@siggraph.org
If you find errors or omissions on your profile page, please contact us: historyarchives@siggraph.org
Did you know you can send us a photo of yourself and a bio and we will post it? Make sure the photo is at least 1000 x 1000 and send it to the email above along with the bio and we will add it to your page.