
“Synthesis of constrained walking skills”
Conference:
Type(s):
Title:
- Synthesis of constrained walking skills
Session/Category Title:
- Character animation I
Presenter(s)/Author(s):
Abstract:
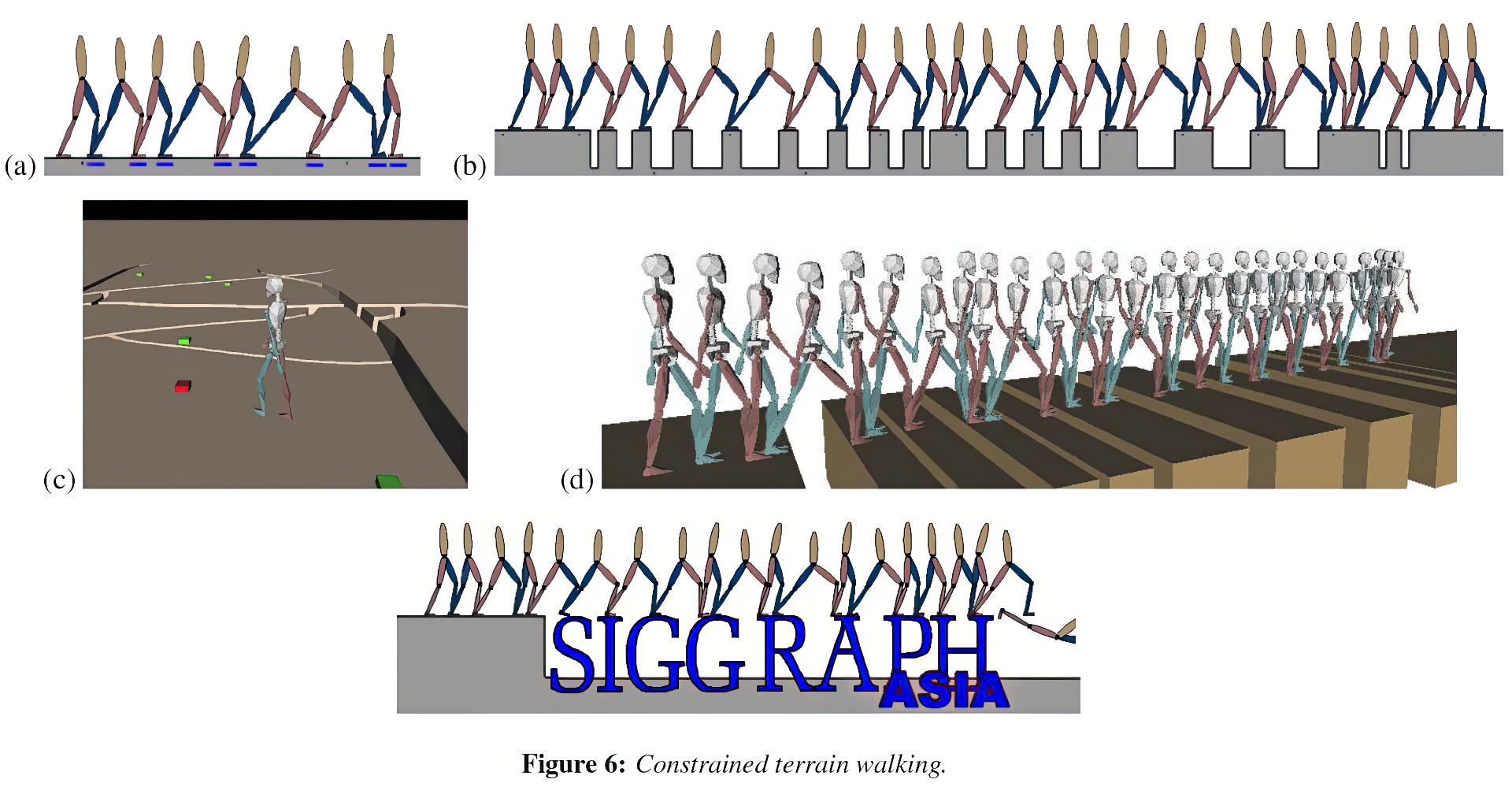
Simulated characters in simulated worlds require simulated skills. We develop control strategies that enable physically-simulated characters to dynamically navigate environments with significant stepping constraints, such as sequences of gaps. We present a synthesis-analysis-synthesis framework for this type of problem. First, an offline optimization method is applied in order to compute example control solutions for randomly-generated example problems from the given task domain. Second, the example motions and their underlying control patterns are analyzed to build a low-dimensional step-to-step model of the dynamics. Third, this model is exploited by a planner to solve new instances of the task at interactive rates. We demonstrate real-time navigation across constrained terrain for physics-based simulations of 2D and 3D characters. Because the framework sythesizes its own example data, it can be applied to bipedal characters for which no motion data is available.
References:
1. Byl, K., and Tedrake, R. 2008. Approximate optimal control of the compass gait on rough terrain. In Proc. Int’l Conf. on Robotics and Automation (ICRA).Google Scholar
2. Chestnutt, J., and Kuffner, J. 2004. A tiered planning strategy for biped navigation. In Proceedings of the IEEE – RAS / RSJ Conference on Humanoid Robots.Google Scholar
3. Chestnutt, J., Lau, M., Cheung, K. M., Kuffner, J., Hodgins, J. K., and Kanade, T. 2005. Footstep planning for the honda asimo humanoid. In Proc. IEEE Int’l Conf. on Robotics and Automation.Google Scholar
4. Choi, M., Lee, J., and Shin, S. 2003. Planning biped locomotion using motion capture data and probabilistic roadmaps. ACM Transactions on Graphics (TOG) 22, 2, 182–203. Google ScholarDigital Library
5. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive simulation of stylized human locomotion. ACM Trans. Graph. 27, 3. Google ScholarDigital Library
6. da Silva, M., Abe, Y., and Popović, J. 2008. Simulation of human motion data using short-horizon model-predictive control. Computer Graphics Forum 27, 2.Google ScholarCross Ref
7. Hodgins, J. K., and Pollard, N. S. 1997. Adapting simulated behaviors for new characters. In Proceedings of SIGGRAPH ’97, 153–162. Google Scholar
8. Hodgins, J. K., and Raibert, M. N. 1991. Adjusting step length for rough terrain locomotion. IEEE Trans. on Robotics and Automation 7, 3.Google ScholarCross Ref
9. Hofmann, A. G. 2006. Robust Execution of Bipedal Walking Tasks from Biomechanical Principles. PhD thesis, Massachusetts Institute of Technology. Google Scholar
10. Huang, P. S., and van de Panne, M. 1996. A search algorithm for planning dynamic motions. In Proceedings of the Eurographics Workshop on Computer Animation and Simulation, 169–182. Google ScholarDigital Library
11. Kuffner, J., Nishiwaki, K., Kagami, S., Kuniyoshi, Y., and Inoue, H. 2003. Online footstep planning for humanoid robots. In Proc. IEEE Int’l Conf. on Robotics and Automation.Google Scholar
12. Kwon, T., and Shin, S. Y. 2005. Motion modeling for on-line locomotion synthesis. In Proc. ACM SIGGRAPH / Eurographics Symposium on Computer Animation, 29–38. Google Scholar
13. Laszlo, J. F., van de Panne, M., and Fiume, E. 1996. Limit cycle control and its application to the animation of balancing and walking. In Proc. ACM SIGGRAPH, 155–162. Google Scholar
14. Liu, K., Hertzmann, A., and Popović, Z. 2005. Learning physics-based motion style with nonlinear inverse optimization. ACM Trans. on Graphics (Proc. SIGGRAPH) 23, 3, 1071–1081. Google ScholarDigital Library
15. Mukai, T., and Kuriyama, S. 2005. Geostatistical motion interpolation. ACM Trans. on Graphics (Proc. SIGGRAPH), 1062–1070. Google Scholar
16. Popović, Z., and Witkin, A. 1999. Physically based motion transformation. In Proc. ACM SIGGRAPH, 11–20. Google Scholar
17. Raibert, M. H., and Hodgins, J. K. 1991. Animation of dynamic legged locomotion. In Proc. SIGGRAPH ’91, 349–358. Google Scholar
18. Reitsma, P. S. A., and Pollard, N. S. 2007. Evaluating motion graphs for character animation. ACM Transactions on Graphics 26, 4. Google ScholarDigital Library
19. Safonova, A., and Hodgins, J. K. 2007. Construction and optimal search of interpolated motion graphs. ACM Trans. on Graphics (Proc. SIGGRAPH), Article 106. Google Scholar
20. Safonova, A., Hodgins, J. K., and Pollard, N. S. 2004. Synthesizing physically realistic human motion in low-dimensional, behavior-specific spaces. ACM Trans. on Graphics (Proc. SIGGRAPH), 514–521. Google Scholar
21. Sharon, D., and van de Panne, M. 2005. Synthesis of controllers for stylized planar bipedal walking. In Proc. Int’l Conf. on Robotics and Automation (ICRA).Google Scholar
22. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Trans. on Graphics (Proc. SIGGRAPH), Article 107. Google Scholar
23. van de Panne, M. 1997. From footprints to animation. Computer Graphics Forum 16, 4 (October), 211–223.Google ScholarCross Ref
24. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2005. Gaussian process dynamical models. In Proc. Neural Information Processing Systems Conf., 1441–1448.Google Scholar
25. Yin, K., Loken, K., and van de Panne, M. 2007. Simbicon: Simple biped locomotion control. ACM Trans. on Graphics (Proc. SIGGRAPH), Article 105. Google Scholar
26. Yin, K., Coros, S., Beaudoin, P., and van de Panne, M. 2008. Continuation methods for adapting simulated skills. ACM Trans. Graph. 27, 3. Google ScholarDigital Library
27. Zeglin, G., and Brown, B. 1998. Control of a bow leg hopping robot. In Proc. IEEE Intl Conf. on Robotics and Automation, 793–798.Google Scholar