
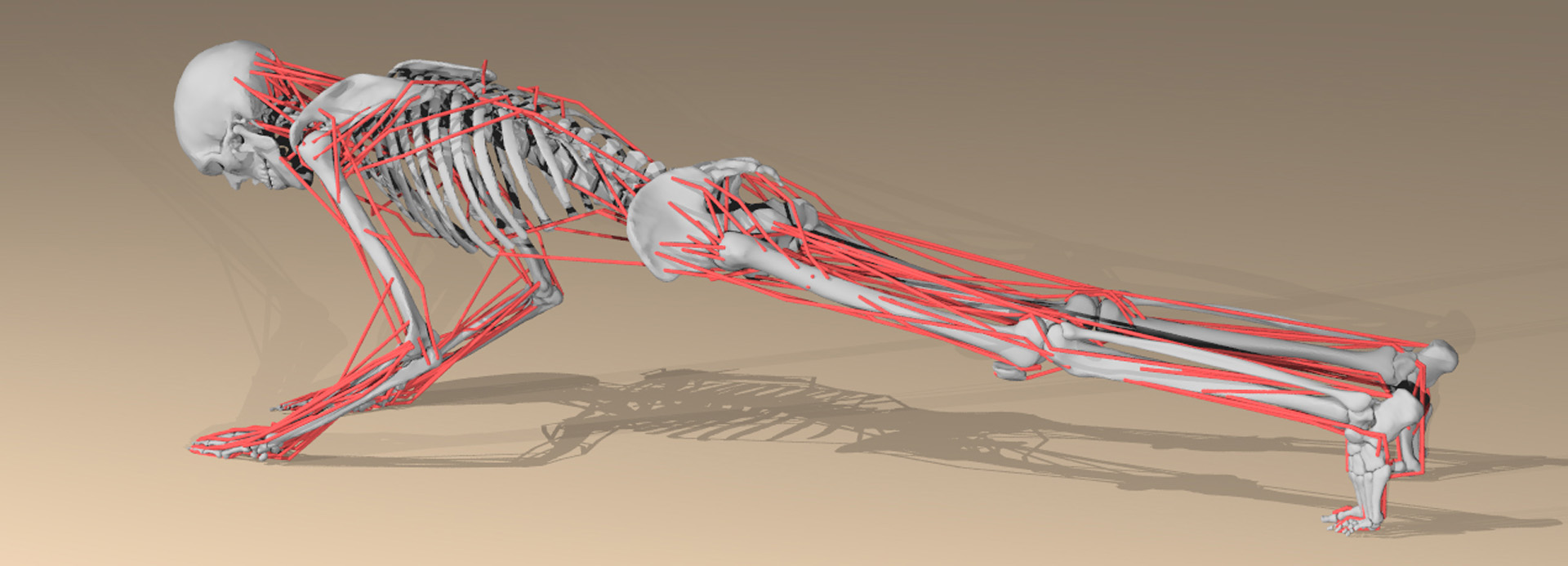
“Impulse-based PD control for joints and muscles” by Petterson, Guendelman and Fedkiw
Conference:
Type(s):
Talk Type(s):
Title:
- Impulse-based PD control for joints and muscles
Session/Category Title:
- Twisted
Presenter(s)/Author(s):
Moderator(s):
Abstract:
A novel approach to proportional-derivative control of articulated bodies driven by torque and muscle actuators. The approach decouples stiffness from control.
References:
1. Guendelman, E., Bridson, R., and Fedkiw, R. 2003. Nonconvex rigid bodies with stacking. ACM Trans. Graph. (SIGGRAPH Proc.) 22, 3, 871–878.
2. Neff, M., and Fiume, E. 2002. Modeling tension and relaxation for computer animation. In Proc. ACM SIGGRAPH Symp. on Comput. Anim., 77–80.
3. Weinstein, R., Teran, J., and Fedkiw, R. 2005. Dynamic simulation of articulated rigid bodies with contact and collision. IEEE Trans. on Vis. and Comput. Graph. (in press).
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org