
“Uncertainty quantification for multi-scan registration” by Huang, Liang and Huang
Conference:
Type(s):
Title:
- Uncertainty quantification for multi-scan registration
Presenter(s)/Author(s):
Abstract:
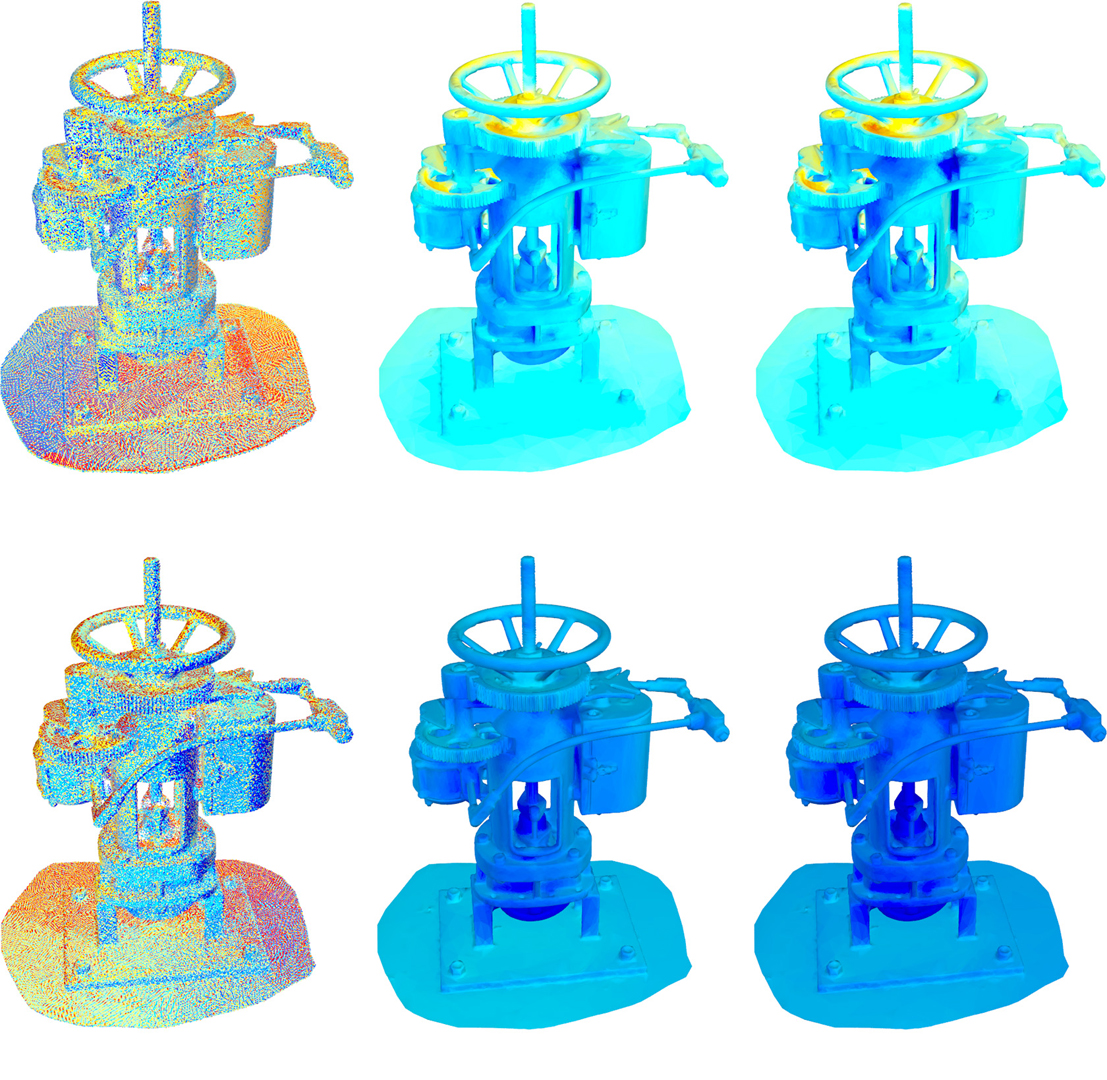
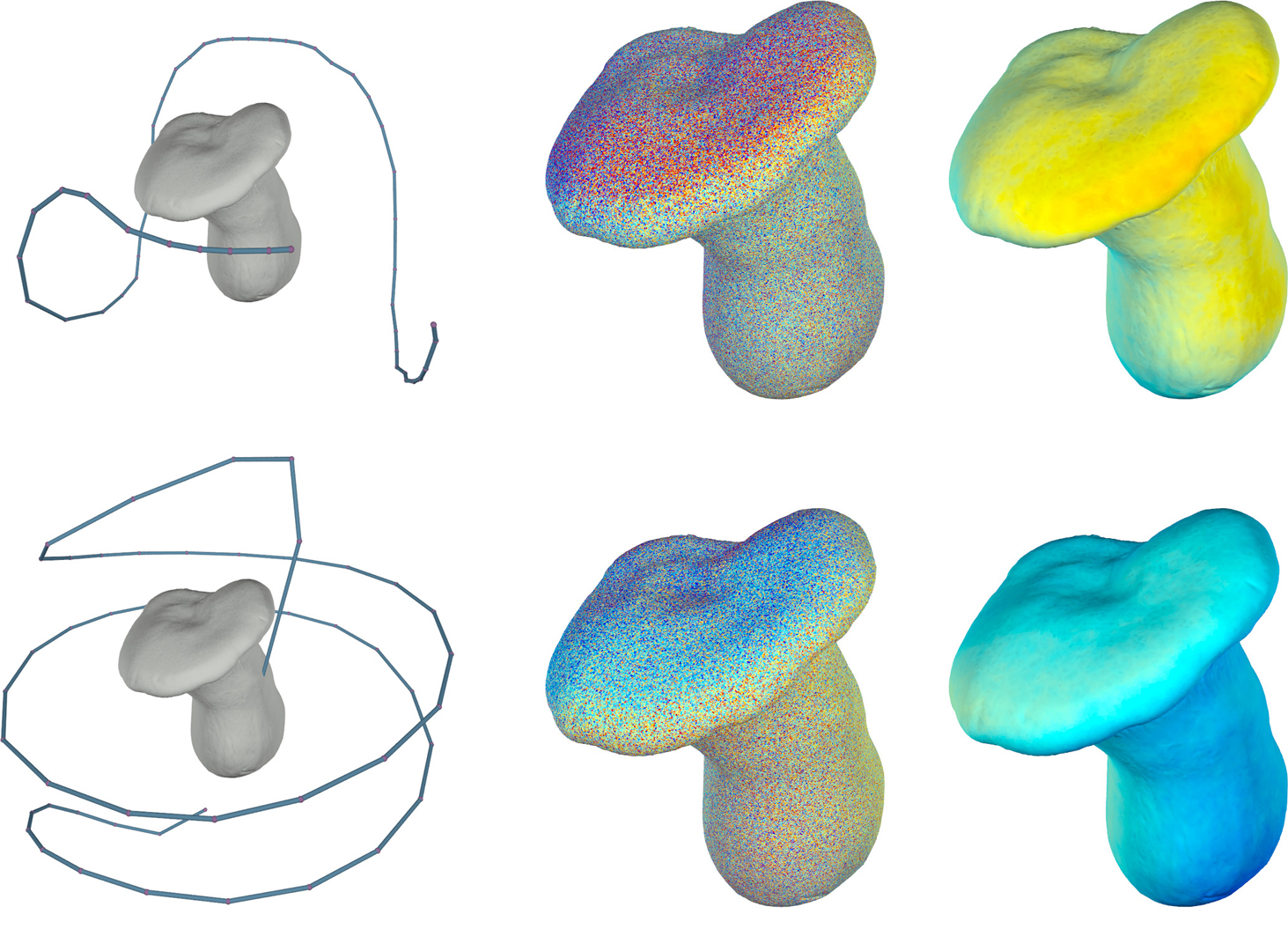
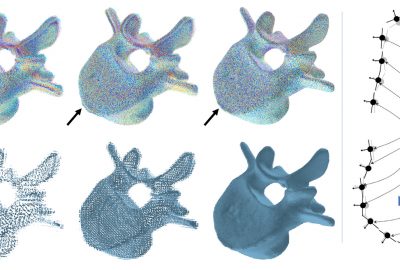
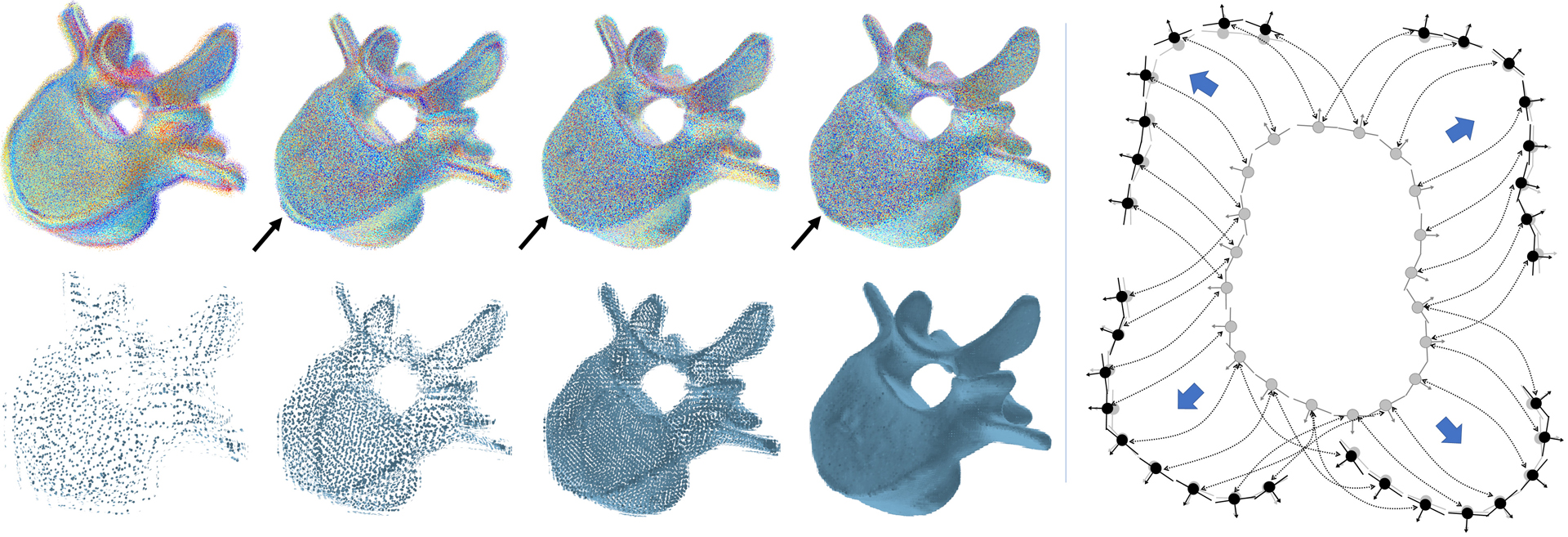
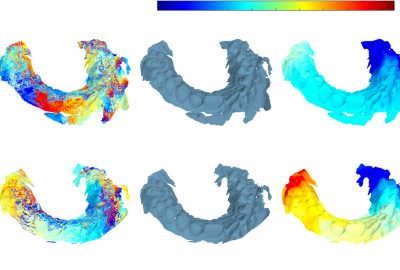
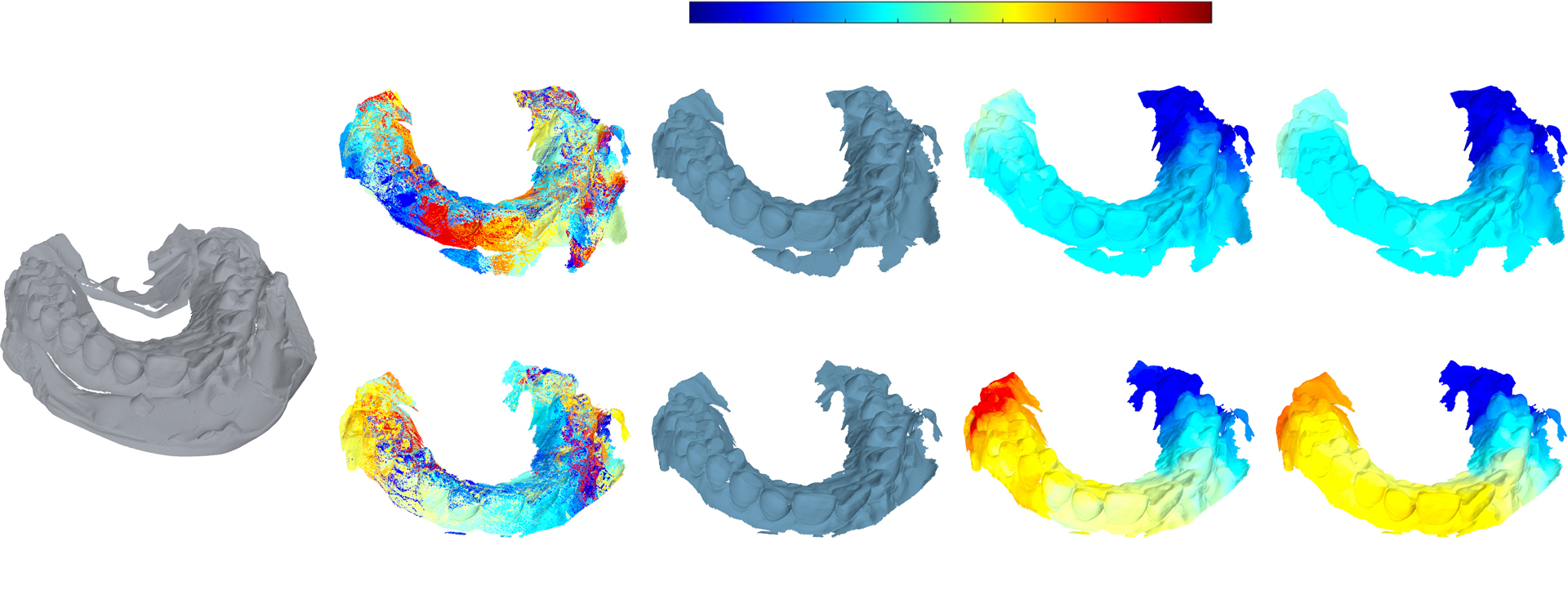
We introduce robust and informative uncertainty measures for multi-scan registration that only requires a single input. Applications include automatic checking of registration quality and model-based view planning for 3D acquisition.
Additional Images:
-
- 2020 Poster: Huang_Uncertainty quantification for multi-scan registration
-
- 2020 Poster: Huang_Uncertainty quantification for multi-scan registration
-
- 2020 Poster: Huang_Uncertainty quantification for multi-scan registration
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org